2019-01-23
According to Enomoto-san's definition:
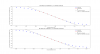
The linear range of the TILT QPD is
vertical linear range: 1.26 mm
vertical calibration factor: 0.006339 mm/cnts
horizontal linear range: 1.42 mm
horizontal calibration factor 0.007087 mm/cnts
Since the arm lengths, according to previous measurements (7781), are 990 (TM to steering mirror) + 300 + 160 = 1450 mm for pitch and 1450 cosd(36.9) = 1159.5 mm for yaw, the linear range in units of µrad converts to:
Pitch: ±217 µrad,
Yaw: ±306 µrad,
Assuming Pitch and Yaw roughly align with the vertical and horizontal axis respectively.
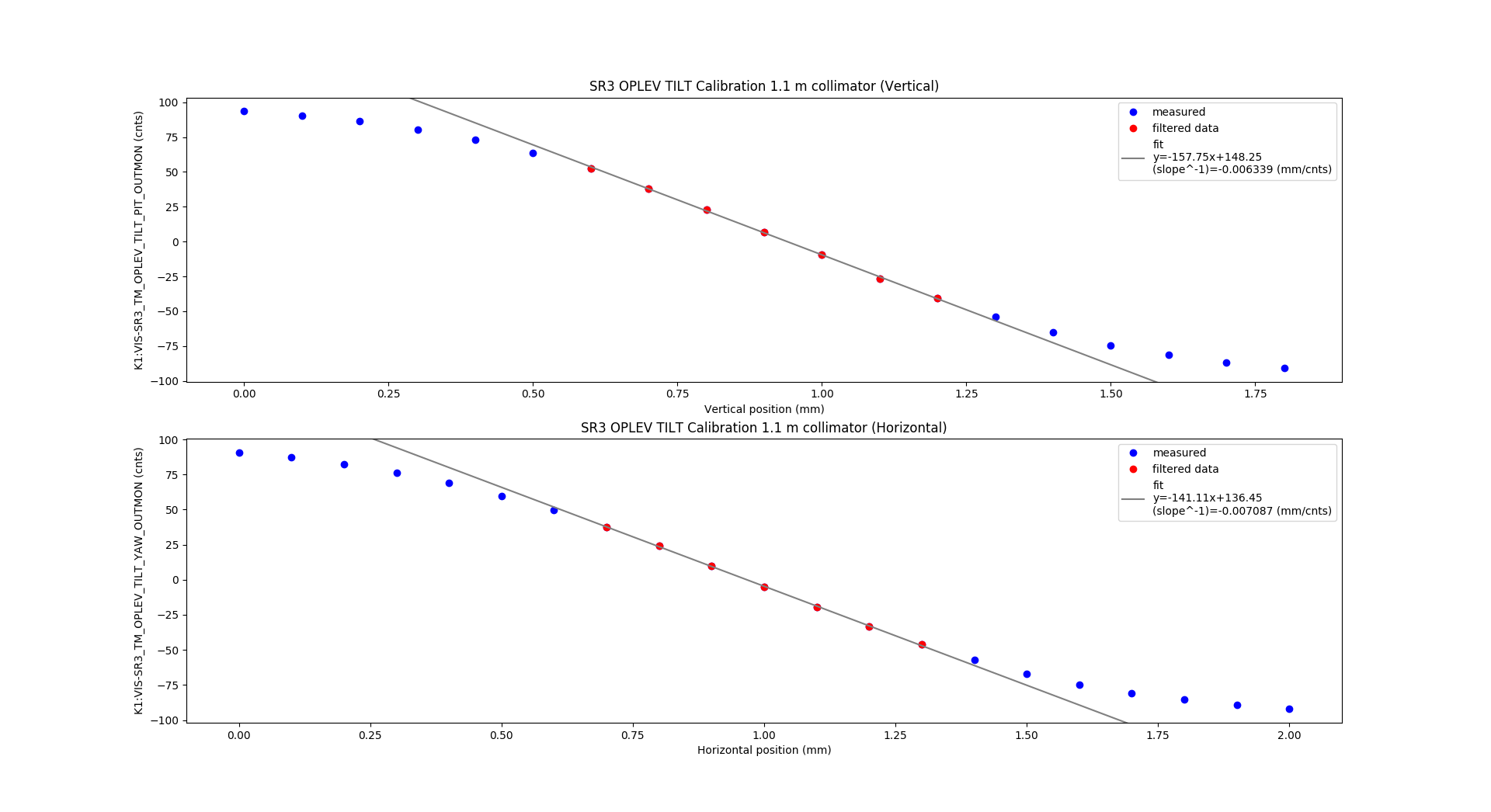
As for the Length sensing QPD,
vertical linear range: 0.22 mm
vertical calibration factor: 0.001140 mm/cnts
horizontal linear range: 0.24 mm
horizontal calibration factor: 0.001163 mm/cnts
With the distances measured previously, the linear range of longitudinal displacement is:
Longitudinal displacement: ±332.8 µm
Assuming it roughly aligns with the vertical axis.
With the above information given, the OL2EUL matrix is:
| TILT_PIT | TILT_YAW | LEN_PIT | LEN_YAW | |
| L_diag | 0 | 0 | -3.4492508 | 0 |
| P_diag | 2.18586207 | 0 | 0 | 0 |
| Y_diag | 0 | 3.05594596 | 0 | 0 |
| TILT_PIT | TILT_YAW | LEN_PIT | LEN_YAW | |
| L_diag | 0 | 0 | -3.4492508 | 0 |
| P_diag | 2.18586207 | 0 | 1.42827586 | 0 |
| Y_diag | 0 | 3.05594596 | 0 | 0 |
Since the steering mirror is not tilted heavily, the above matrices are roughly diagonalized. Further investigation will be done if time is allowed.

{kind=link}
{kind=link}