I have investigated the first modes of the SR2 suspension.
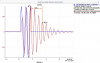
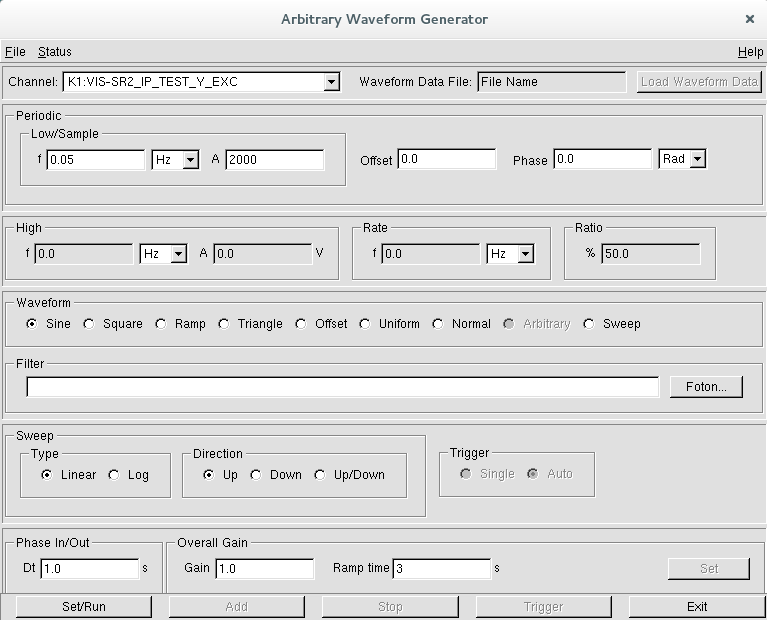
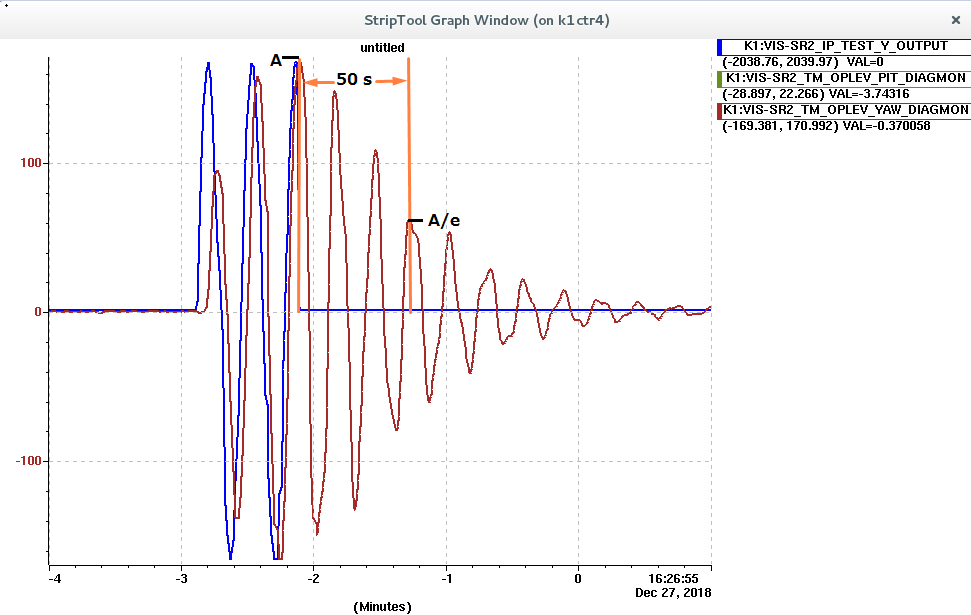
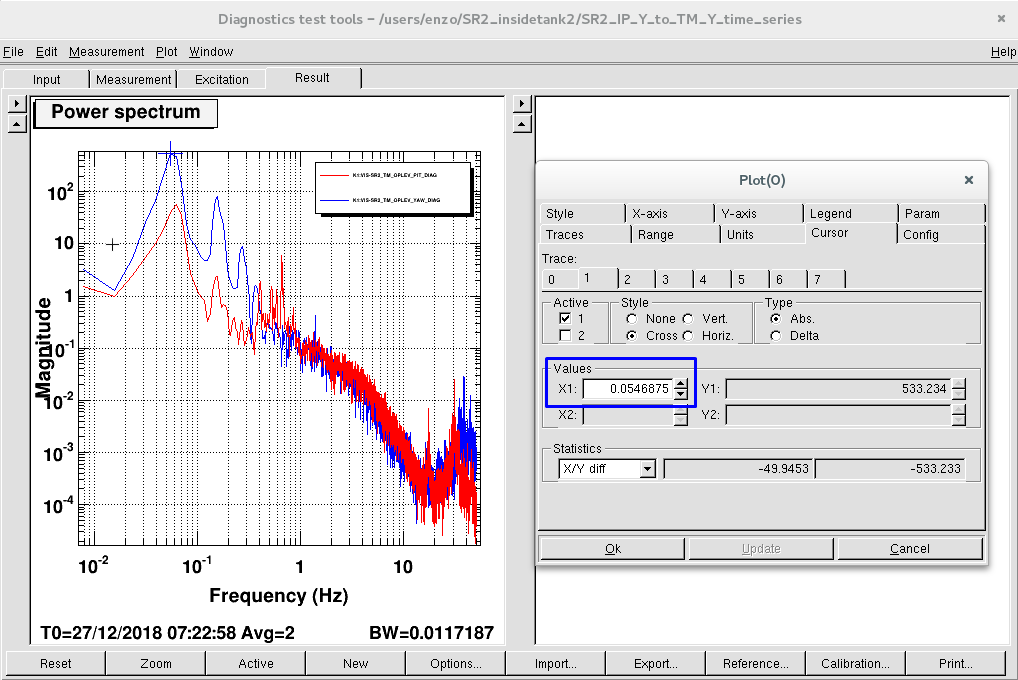
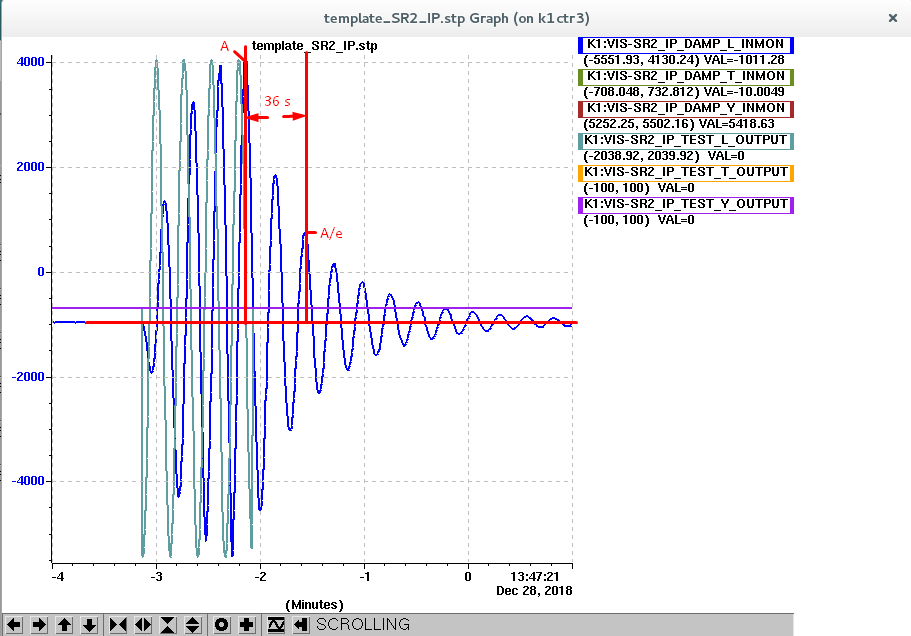
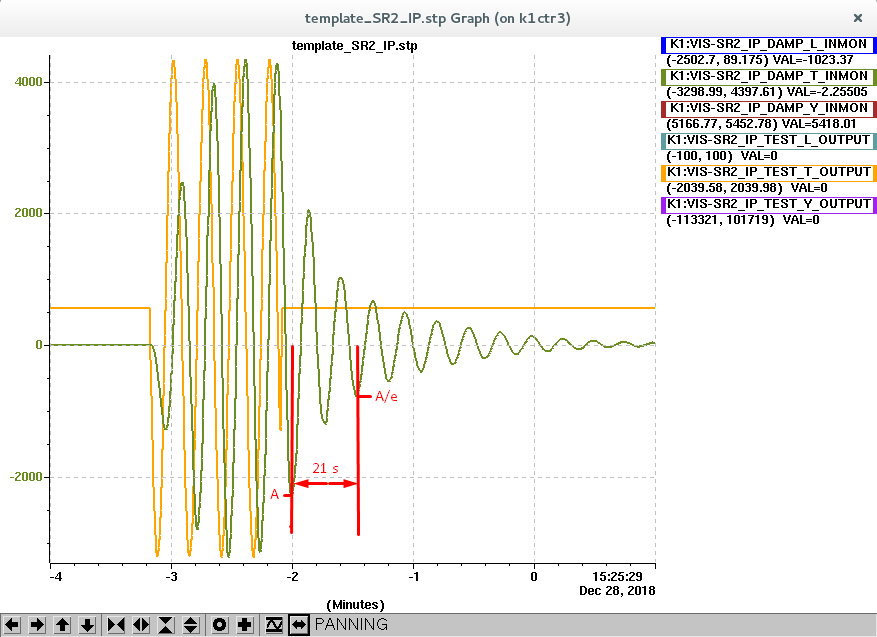
By applying a sinusoidal signal in the actuation matrix of the IP using awggui (Figure 1). I have measured the torsion mode (1), IP translation mode (2,3) and IP rotation mode (7).
As a summary:
| Mode | Frequency [Hz] | Decay time [s] | Q factor | Comments |
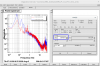
| 1.- Wire torsion | 0.0547 | 50 | Q1 = 8.59 | Figure 2, 3 |
| 2.- IP translation | 0.0625 | 36 | Q2 = 7.07 | Figure 4 |
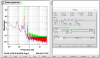
| 3.- IP translation | 0.0625 | 21 | Q3 = 4.12 | Figure 5 |
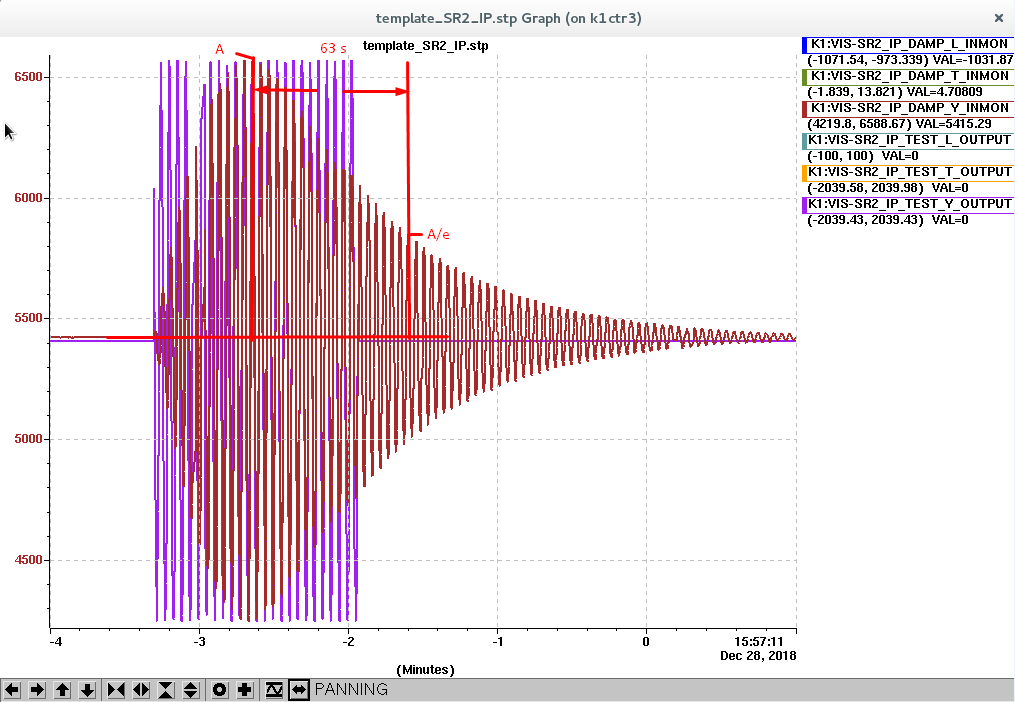
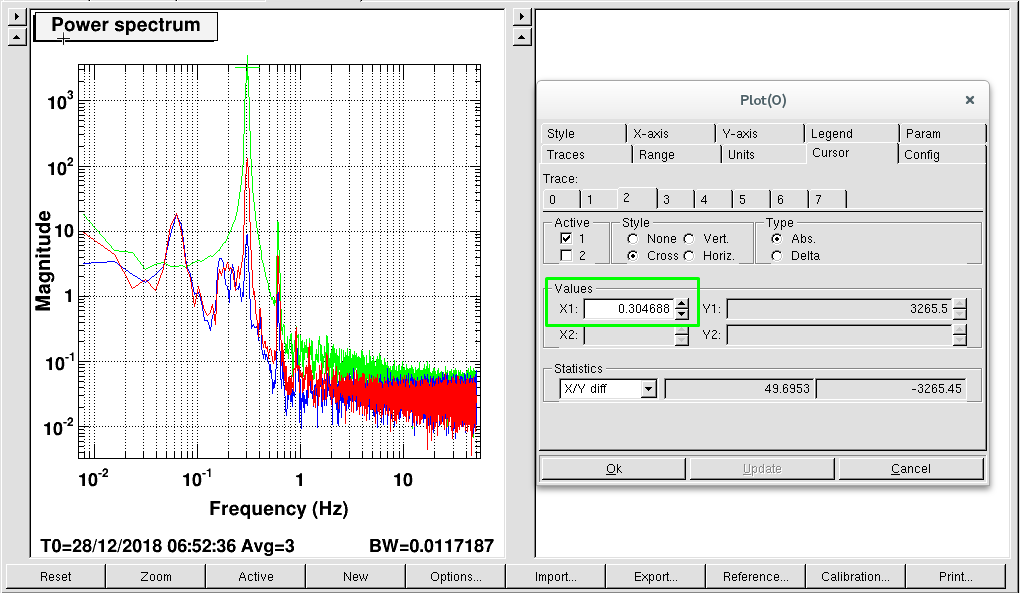
| 7.- IP rotation | 0.3047 | 63 | Q7 = 60.31 | Figure 6,7 |
This means we don't need to adjust the MD height, because it meets the requirements.
Later we should measure this again with the IP stage with closed control loop.
The data can be found in users/enzo/SR2_insidetank2/...
| 0.0625 |
| 0.0625 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}