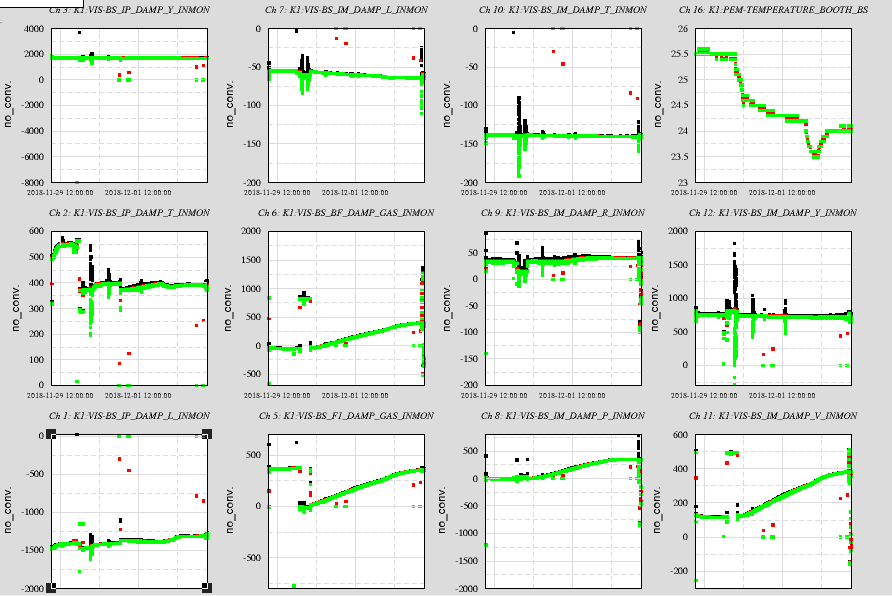
As for the beginning of this week, several places in the BS were touching or out of range.
So first I started by trying to move the F0 keystone which is at -2813 um and BF Keystone which was at -1103 um using the actuation coil but this was not enough.Therefore I adjusted the height using the fishing rod only for the BF, because for now we can not move the F0 FR due to mechanical issues.
Then I tried to move remotely the IM stage in pitch, roll and yaw. Once I finished with pitch and roll. I tried to move the IM in yaw but I could not move it.

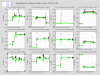
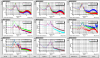
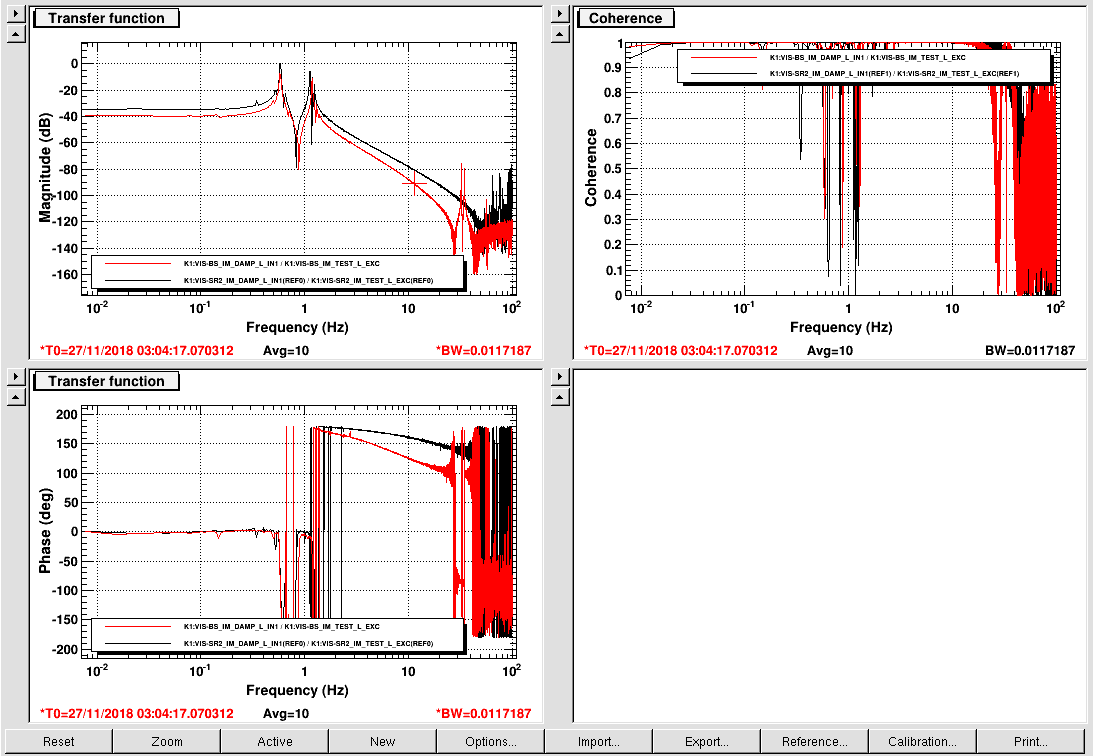
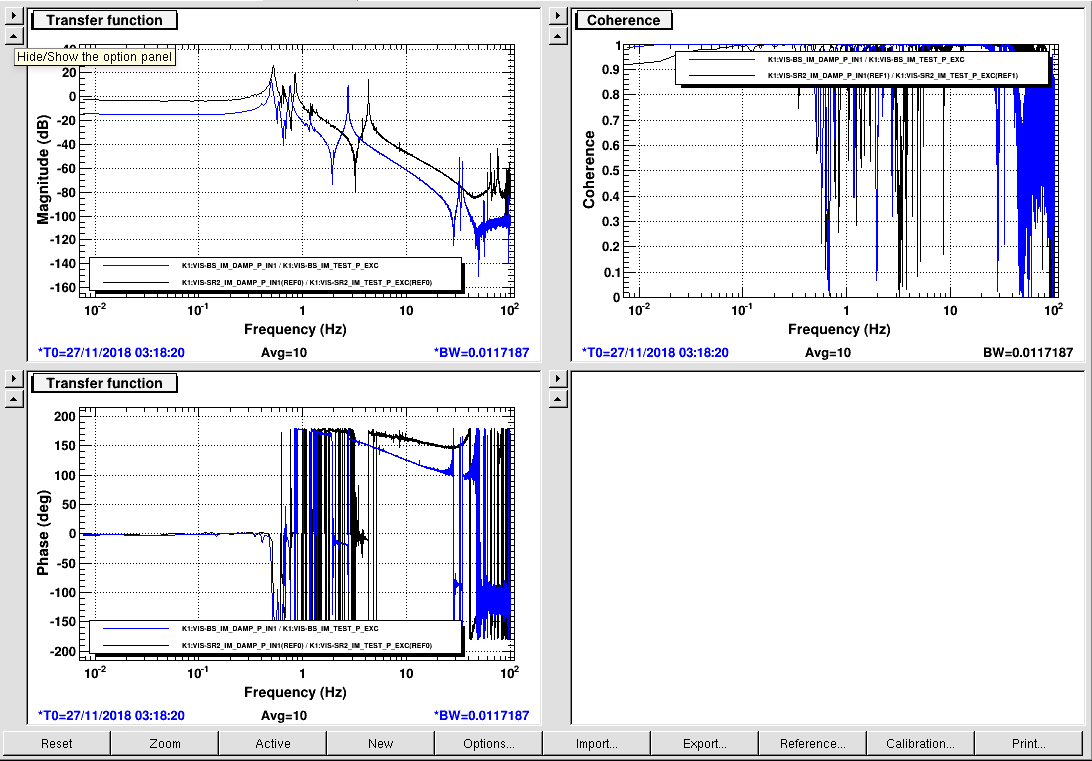
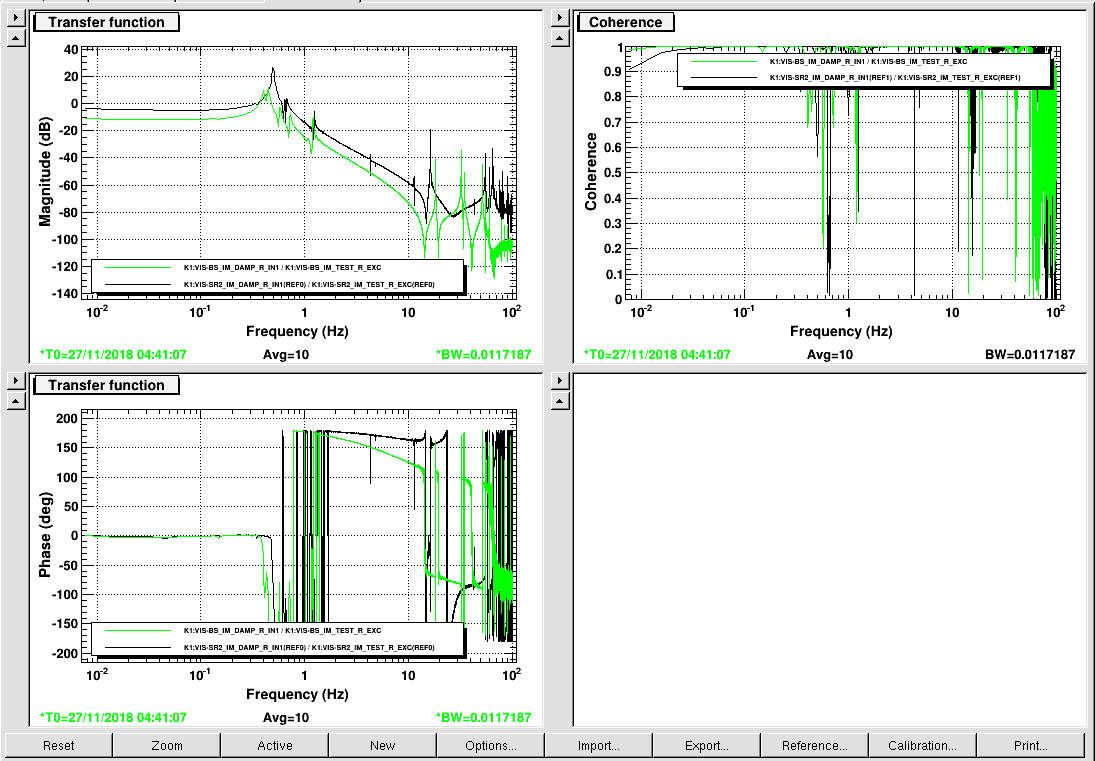
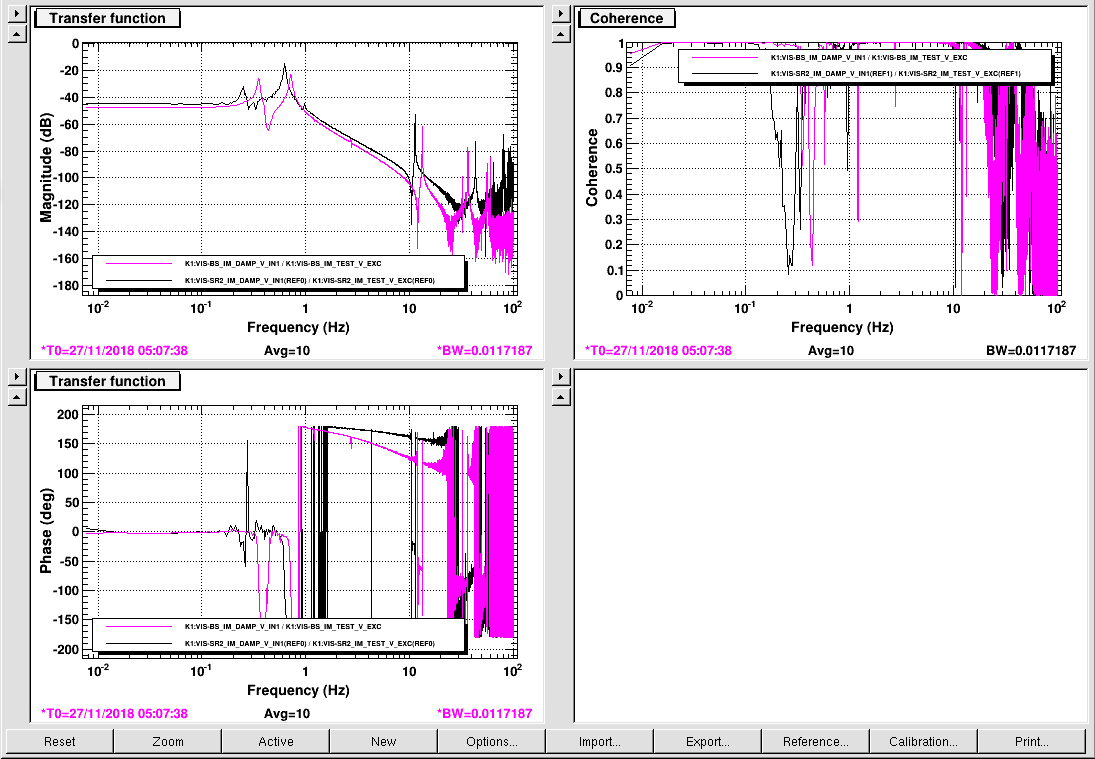
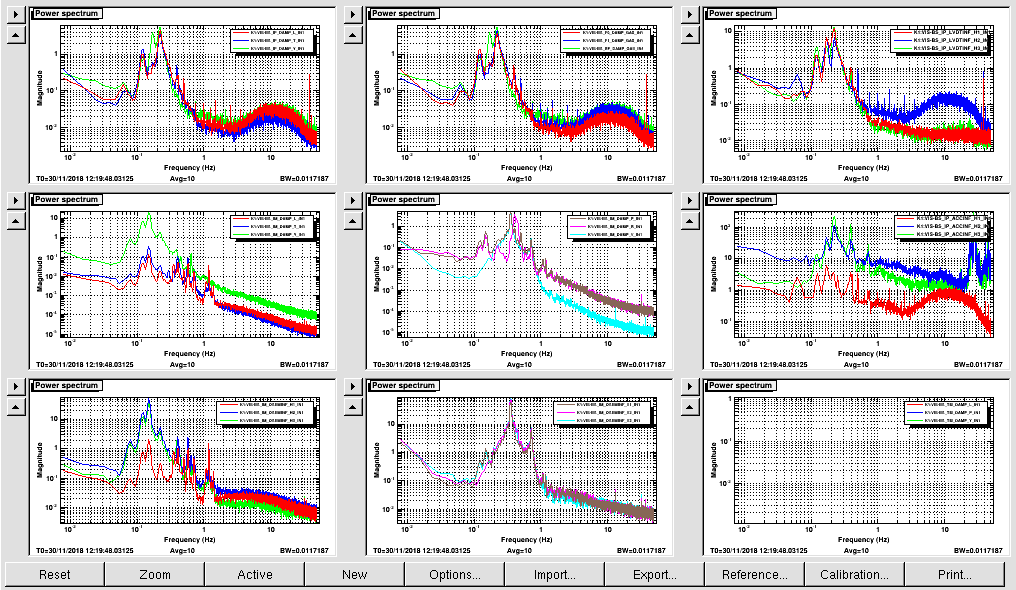
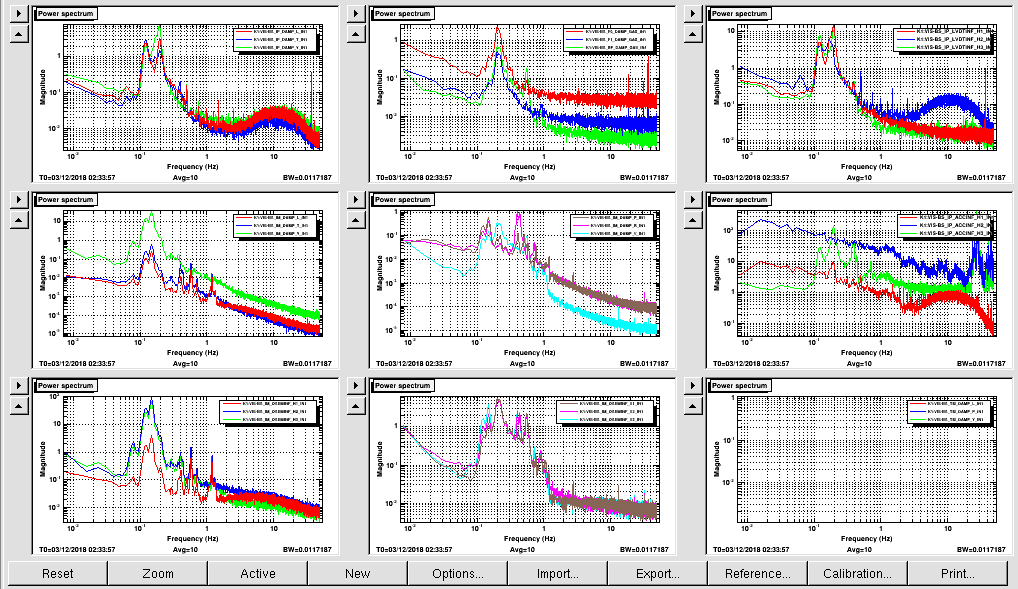
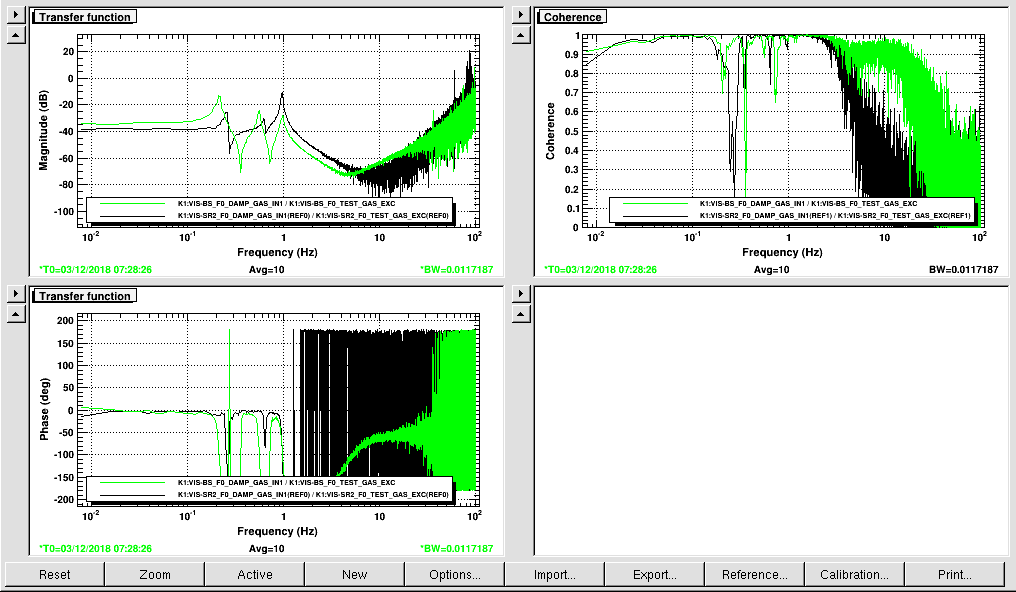
Before trying to move yaw with the joystick inside the cleanbooth, I took some TF of the IM and they looked fine. See pictures attached.
After noticing that the adapter cable of the IM picomotor was broken (pins for yaw motion disconnected), So I replaced the adapter and I moved the IM in yaw.
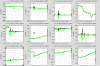
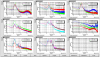
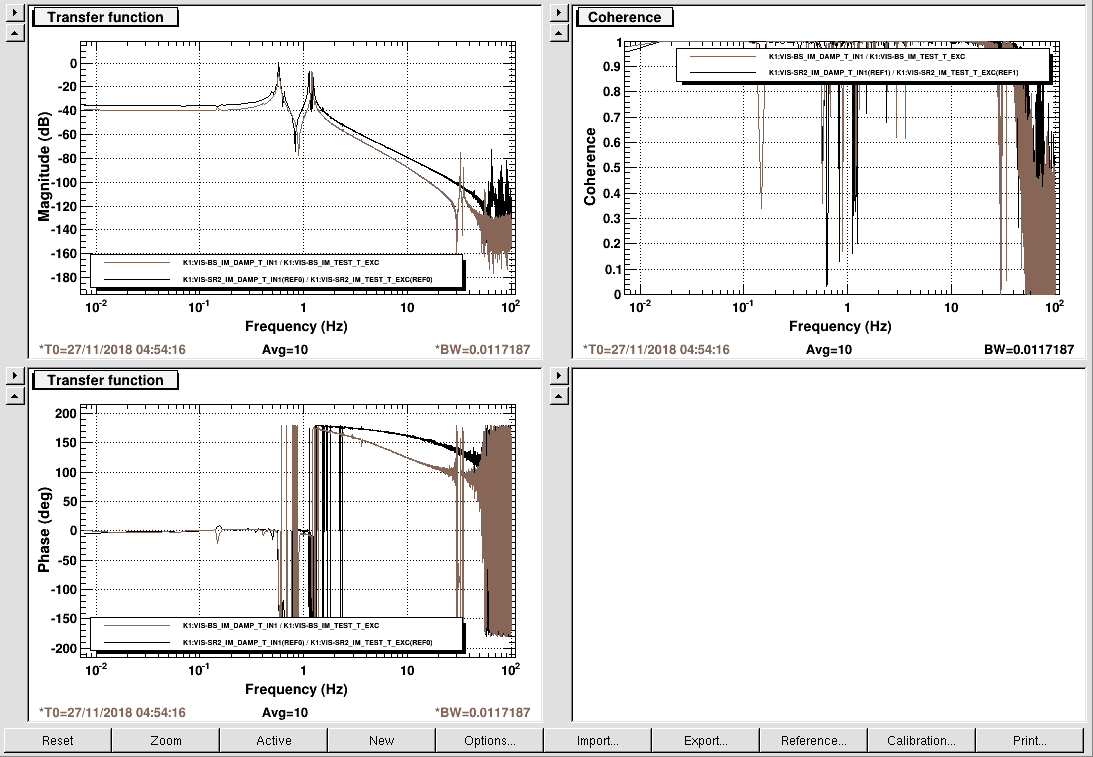
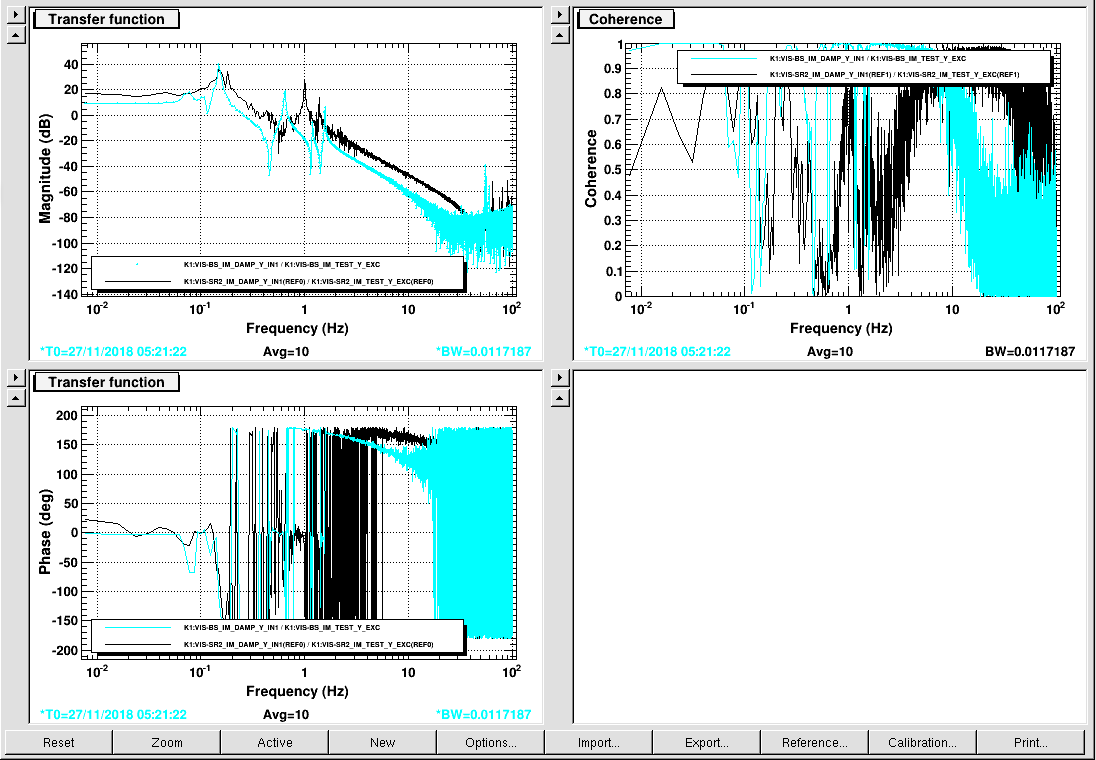
But after that the TF did not look good anymore, and we believe there is something touching again at the IM stage. For example the TF of IM_Y_after. See attached picture.
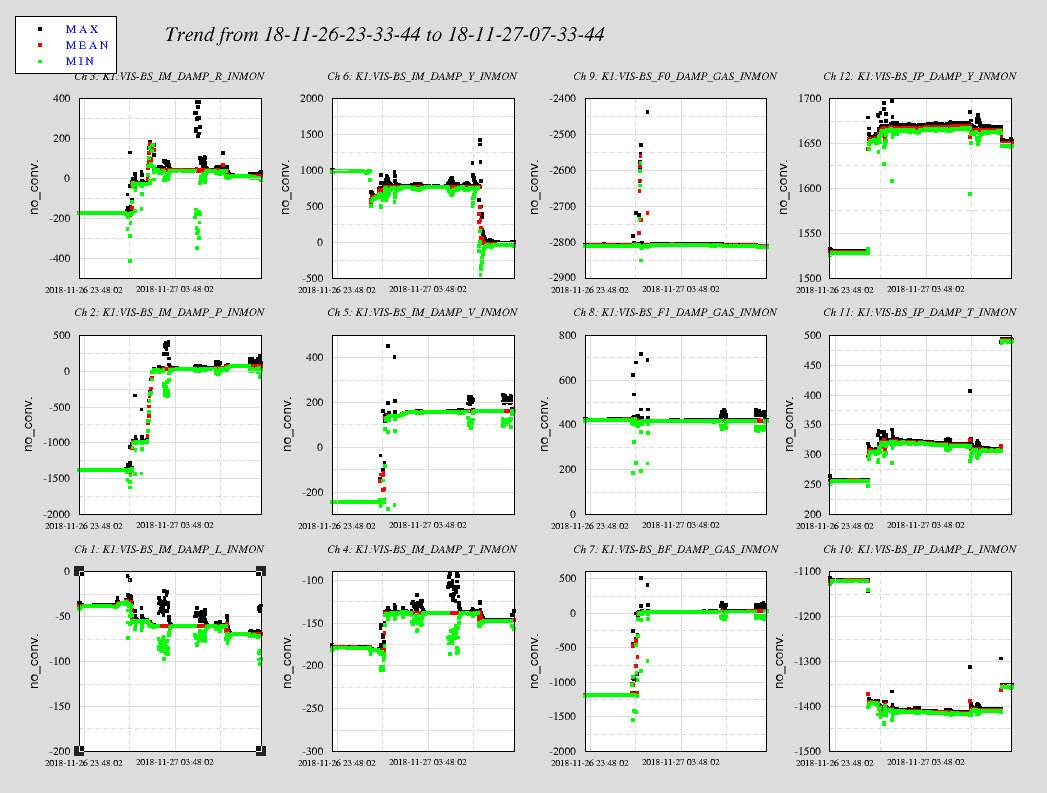
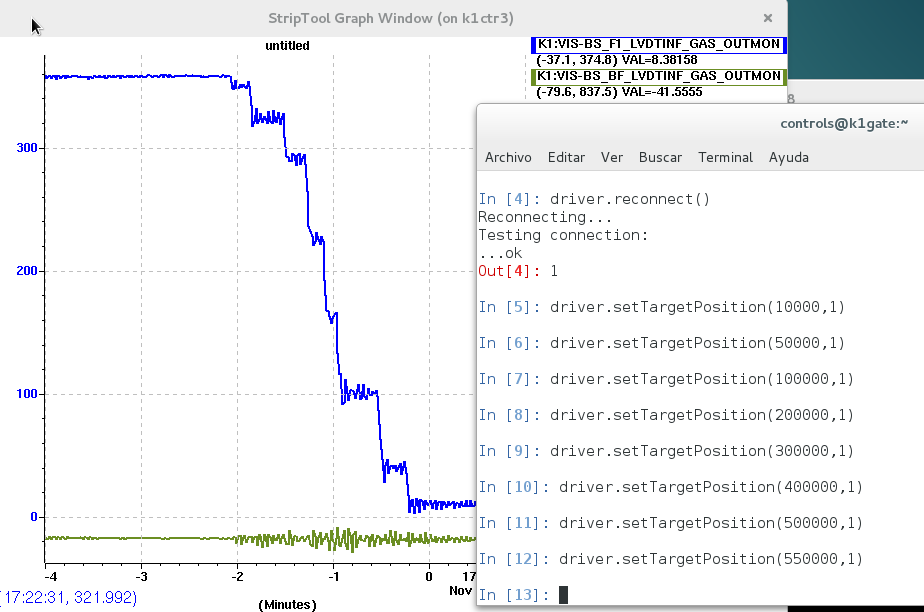
Moving the IM back in yaw but there was no improvement in the measured TFs. So there are still things to be investigated. And in this context we noticed a clear motion in the IP stage that happened at the same time I moved the IM in yaw. See last attachement.
To be continued...


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}