[Enzo, Hirata, Kozu, Fabian]
- Enzo worked in the implementation of the control filters for the IP and the IM.
- Hirata-san worked with Mirapro installing the SR lower breadboards inside the chambers.
-
For the benefit of the members of the team we reviewed how to use the NPort Administrator and the TMCL-PC to move the stepper motors.
- We learned how to use Miyo-kun’s python script to move the stepper motors in a more convenient way in terms of number of steps. We read the manual and we have two comments:
- There is a typo in the directory name where is script is. It should be /kagra/Dropbox/Subsystems/VIS/TypeBp/Scripts/steppingmotor. In the manual it’s written “Script” instead of “Scripts”
- The number of steps to move the motor is not defined with the current position of the motor as a starting point, but with respect to an arbitrary position which it’s not clear how to set. We should set the zero position at the nominal position of the LVDTs.
-
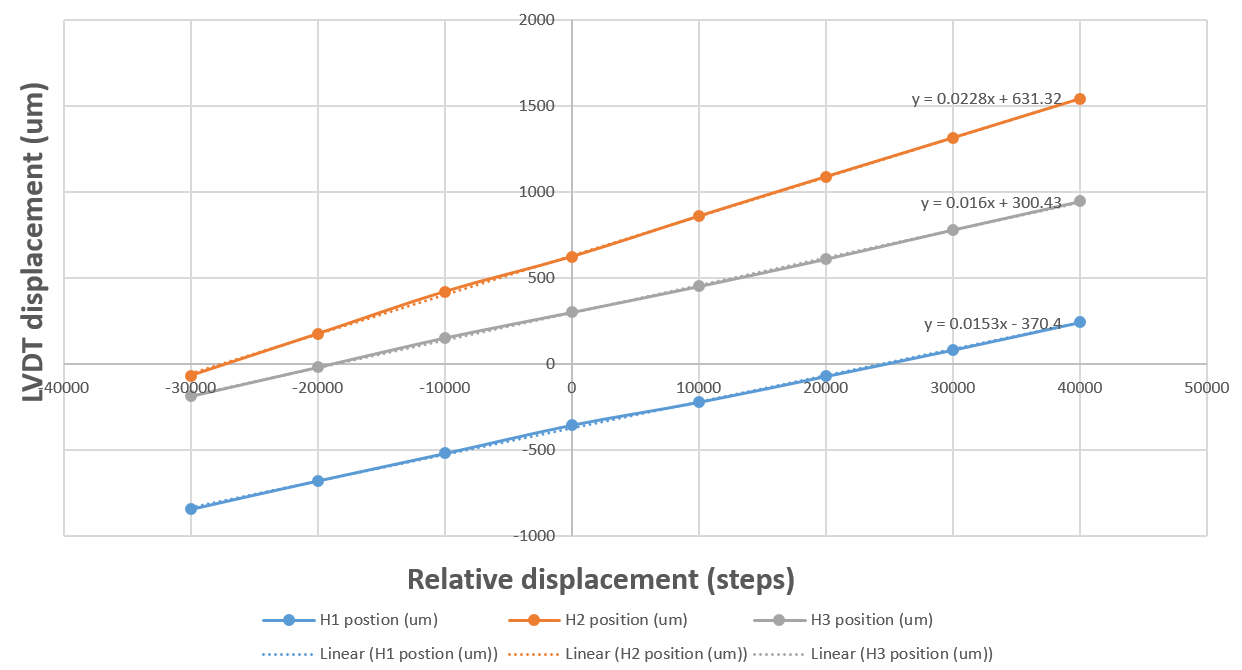
In order to determine the coupling from IP horizontal fishing rods yaw (Y) actuation into longitudinal (L) and transverse (T) displacement we moved the three fishing rods by the same amount (in number of steps) and saw the LVDTs output. The measurement is as follows:
- LVDT #0 (H1 in medm screen): 15 mn/step
- LVDT #1 (H2 in medm screen): 23 nm/step
- LVDT #2 (H3 in medm screen): 16 nm/step
Please note the medm names will be changed to count devices from zero.
Two of the slopes are very similar but one of higher. We’ll use the transformation matrix into virtual sensor in yaw, longitudinal and transverse to check the coupling.

{kind=link}