[Shimoda, Nakano]
The 60Hz HAM noises are hunted at high frequency region. The noise source might be the ground problem between the IOO rack and the PSL room.
1. Added the differential receiver in the PSL room
We put the differential receiver between the offset circuit(S1706916) for AOM control(klog) and the MC servo. We used BNC-ADC converter(D1604781) and DAC-BNC converter(D1604785) as the differential receiver.
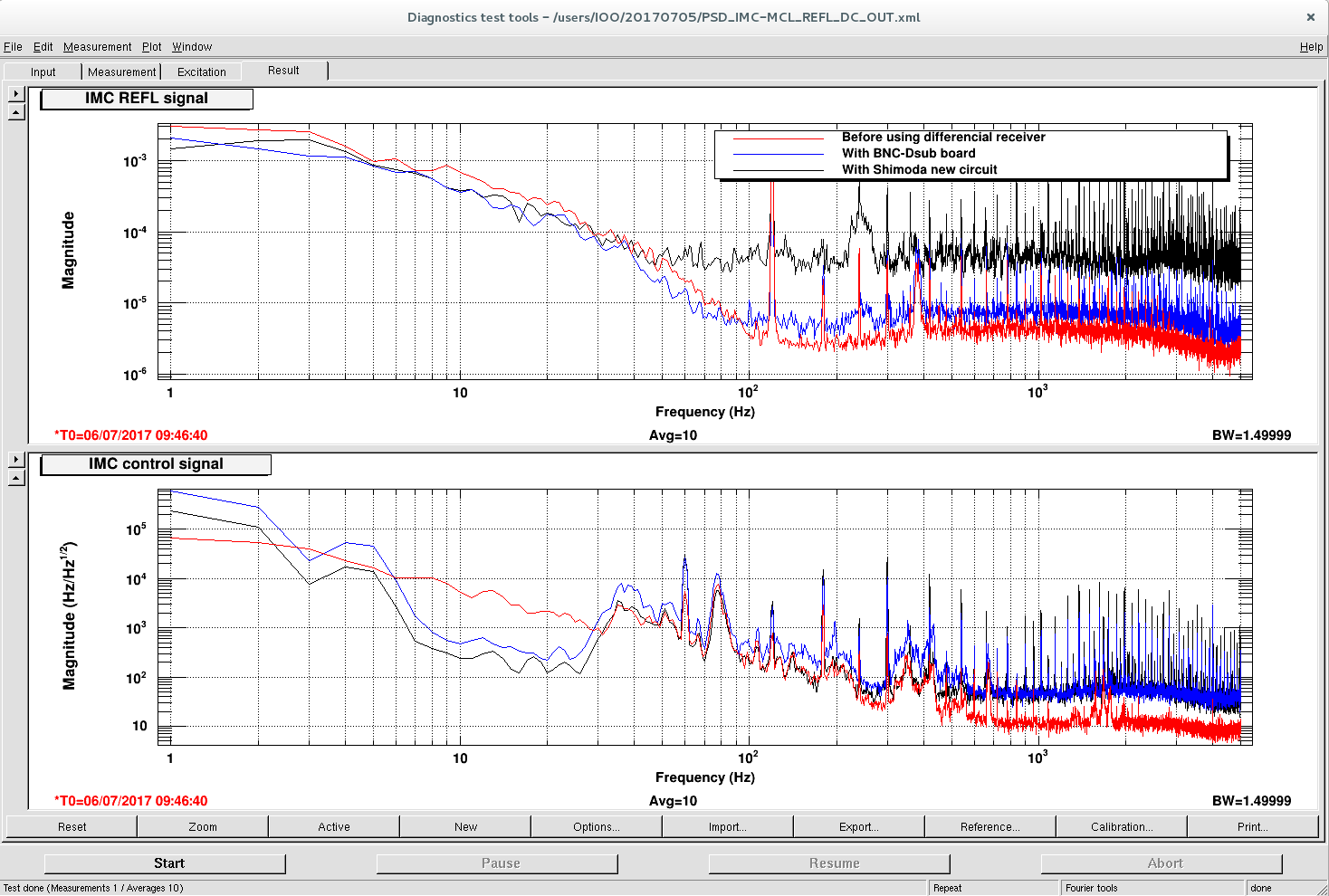
The reason why we put those circuits is that the control signal to AOM comes from the MC servo on the IOO rack, which is located couple of tens meters far. And before we directly connected the offset circuit and MC servo, which means two grounds of those circuit are connected and that made a huge ground loop. As the result the HAM noise were suppressed. I attached the power spectrum of a IMC REFL DC signal and a IMC control signal of the AOM. The black line is the measurement without the differential receiver, and the blue line is after using it. The noise of REFL signal was suppressed by an order. (I tried to calibrate the control signal but it seems not correct. Please don't trust the virtical axis of second plot)
2. Installed the new offset circuit
We were happy with these spectrum even some HAM noise remain because of other small ground loops or some other sources. The IMC was locked much more stably. But we found the 10kHz pole we don't suspected, and this morning we found that the circuits we installed has 10kHz pole. So we could not increase the UGF of the IMC control loop.
Shimoda-kun modified the offset circuit and added the differential receiver, and it worked so well. The red curve is the spectrum with Shimoda-kun's new circuit.
Actually the above configuration, the BNC-DAC converter and offset circuit has connection of ground and those has different power supply, so those had ground loop. New configuration solve that also and the noise are more suppressed.
Now the IMC is much more stable and we are optimizing the servo. Tomorrow we would optimize and measure every transfer functions.
{kind=link}