[Kokeyama, Kirri, Park]
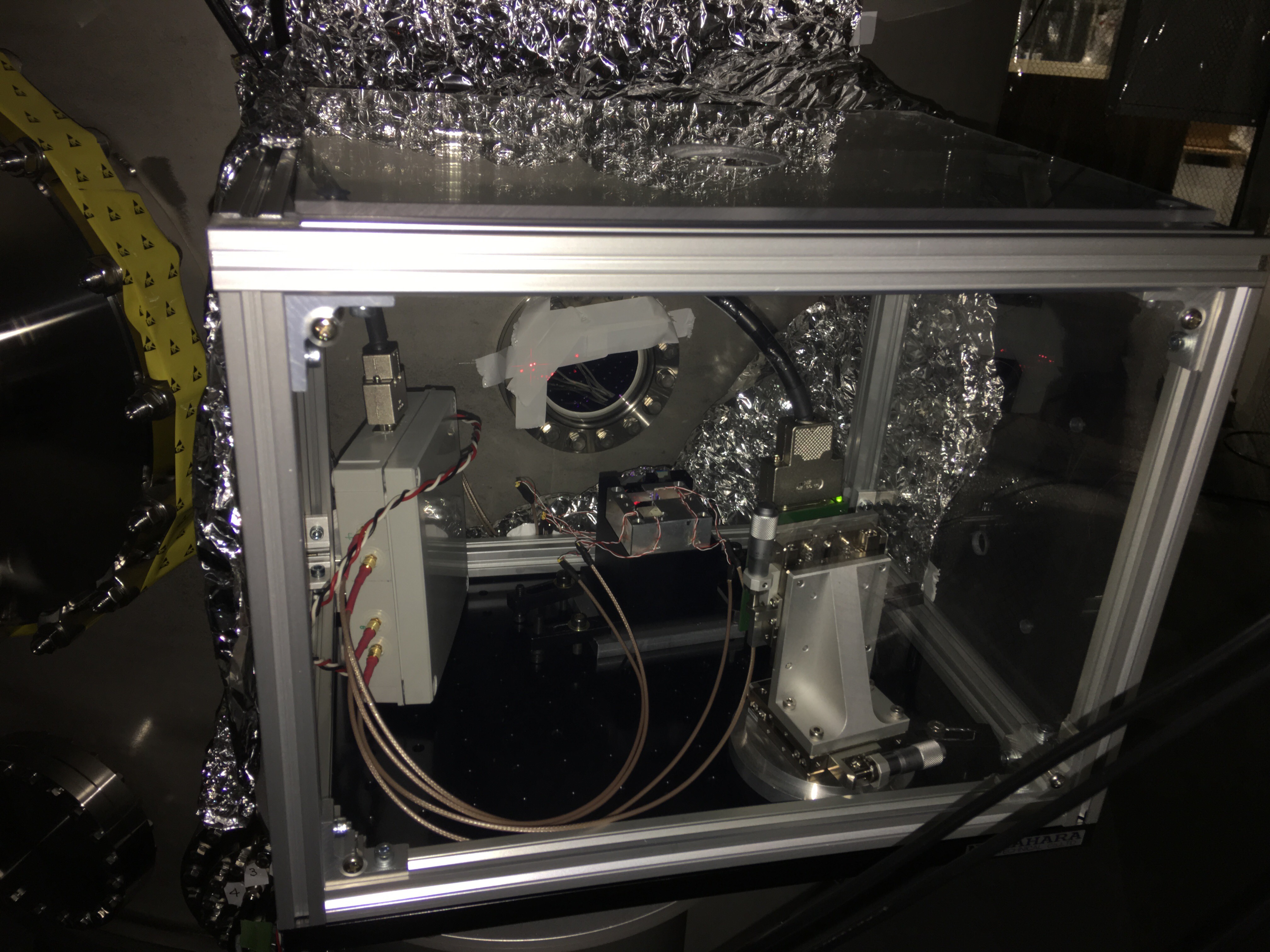
We installed wind shield to detector part.
Because of some electric lines, we removed front panel of the shield and cover with Al foil.


Today's measurement
[Motivation]
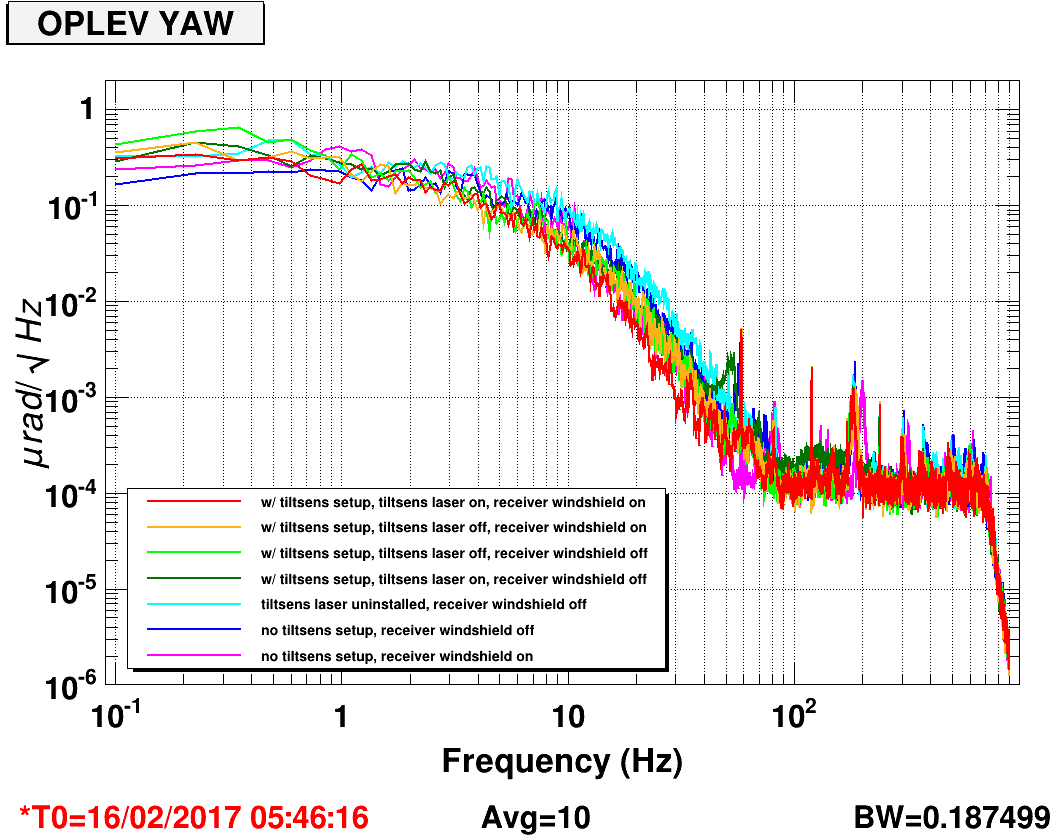
Last time we saw a big jump of the oplev noise level with and without tiltsensor setup on the pylons (see, this log). Today we observed oplev noise level depending on the tiltsensor installation status on the pylons, also on the windshield (only on the receiver pylon).
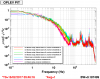
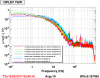
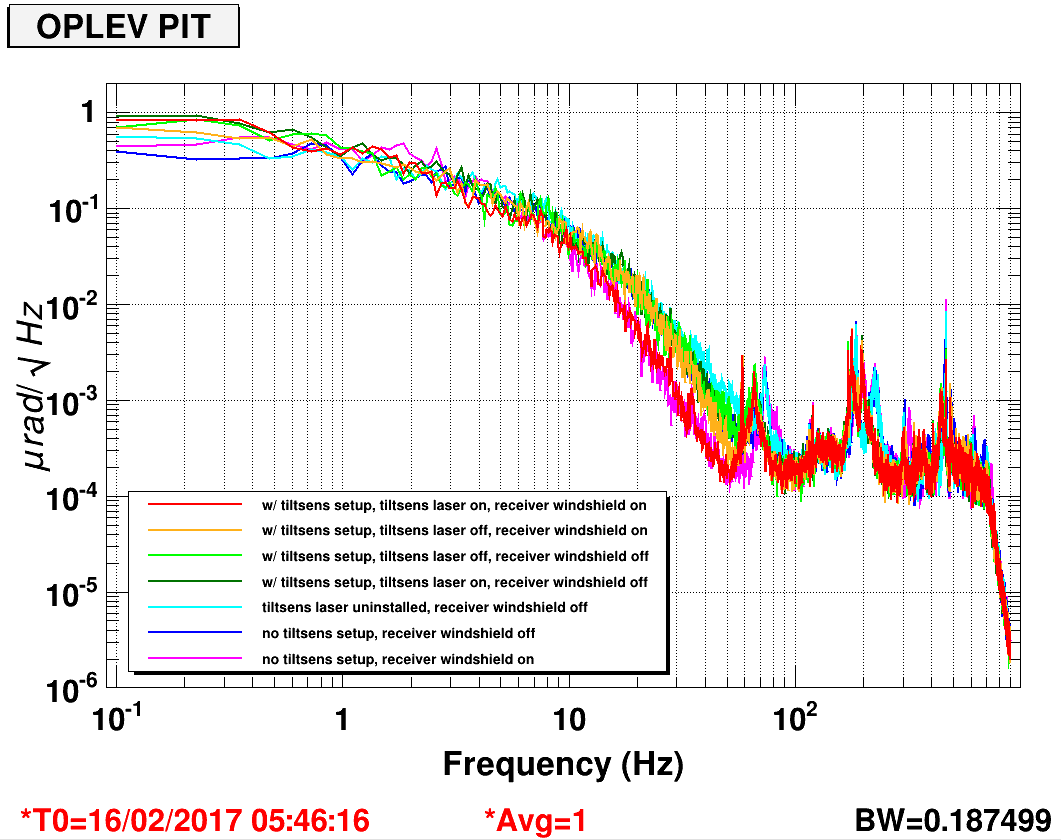
[Result]
Attached plots are the PIT and YAW oplev noise levels in urad with various pylon conditions. We didn't see any big noise level jump like the last time.
[Discussion]
It may be a good thing not to see the noise level significantly. But why did it happen last time? Maybe there was some problem which isn't related to the tiltsensor on the oplev or pylong last time?
{kind=link}
{kind=link}
{kind=link}
{kind=link}