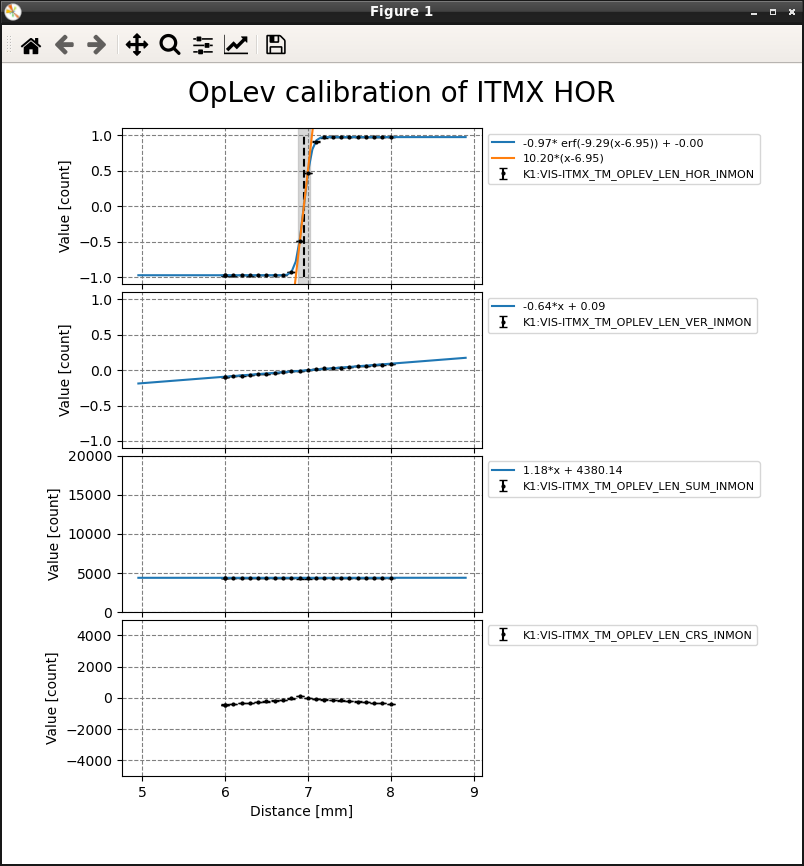
We performed calibration of the tilt and length oplevs.
Because the fluctuation of Yaw motion was larger than EX, Miyo-san set the longer integration time.
Result:
ITMX TILT VER : 2.83 [cnt/mm]
ITMX TILT HOR : -2.75 [cnt/mm]
ITMX LONG HOR : 10.2 [cnt/mm]



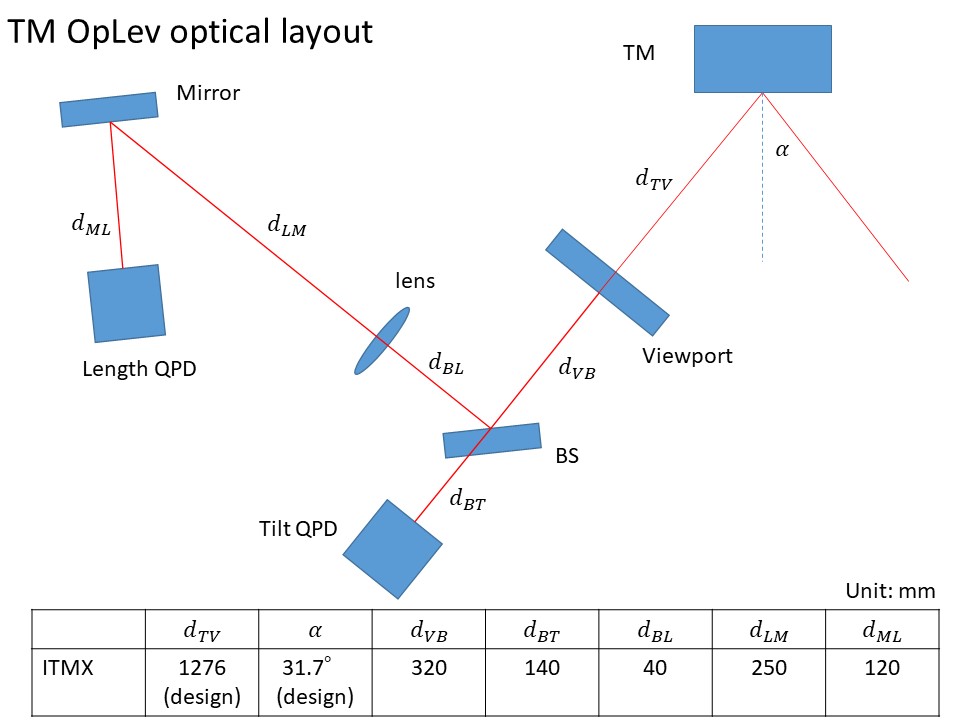
Attached is the parameters which is necessary for calibrating OpLev signals to angles or displacement of the mirror.
Incident angle and distance between sapphire mirror and viewports are the designed values.
The other parameters are measured values at IXC with rulers.
From the slope of graph of QPD counts vs QPD position, we can obtain following calibration factors.
PIT: 119.6 urad/cnt
YAW: 104.7 urad/cnt
LEN: 433.5 um/cnt
I implemented LEN calibration factor at K1:VIS-ITMX_TM_OPLEV_LEN_HOR_GAIN but didn't TILT calibration factors because TILT values are used for the reference of the mirror angle.

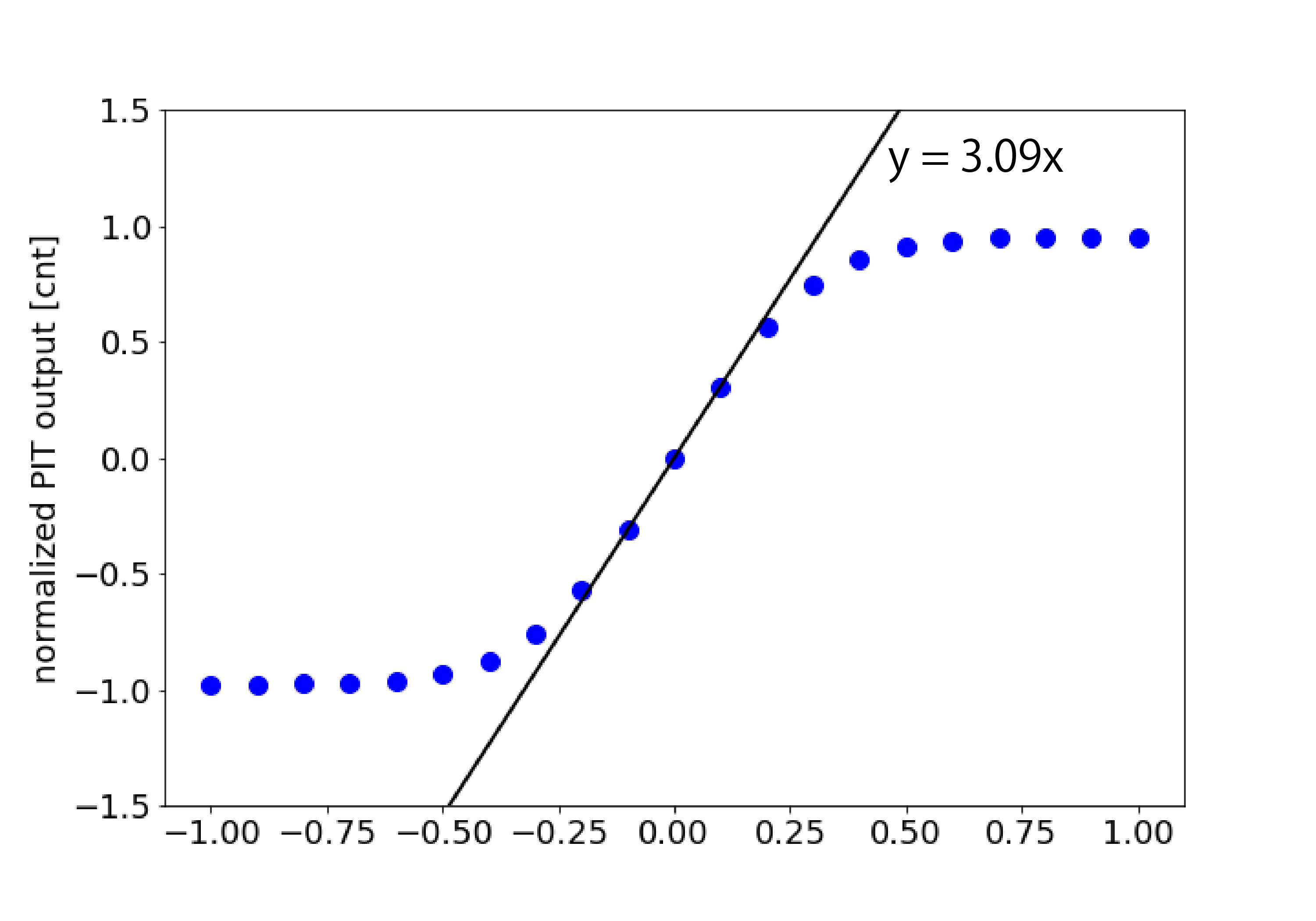
I calculated the response when moving a QPD from the beam profile measurement posted in klog16608.
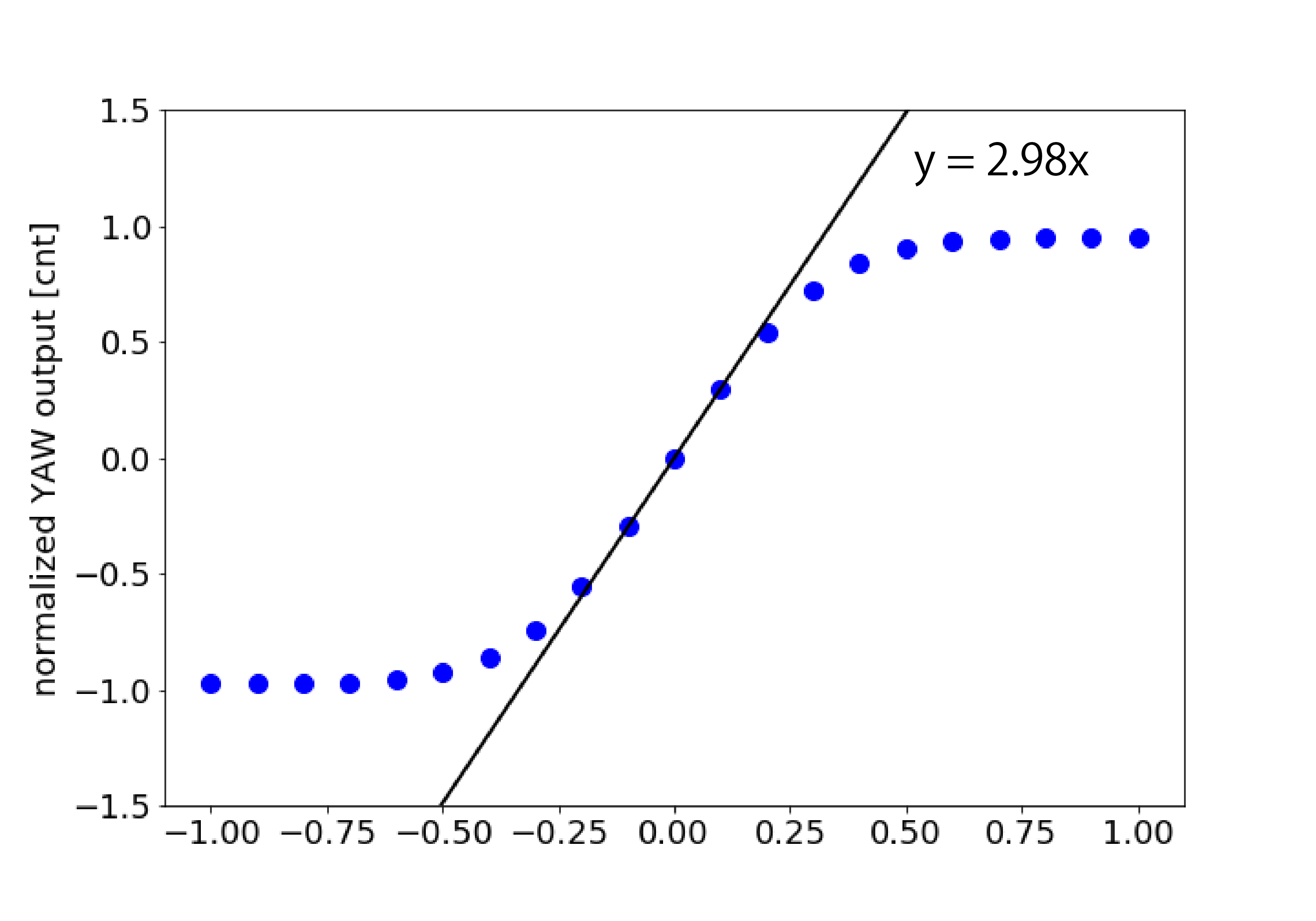
Attached figures are the result for PIT and YAW.
Calculated slops are 3.1 cnt/mm and 3.0 cnt/mm for PIT and YAW, respectively.
These results are 10% larger but seems to be well estimated.
Details of calculation:
I assumed that the beam is gaussian beam and beam diameters for PIT and YAW axes are measured ones (1.017 for PIT and 1.055 for YAW).
I take into account the slit between each segment and segment size for calculation (slit size is 30um and QPD size is 3 mm for each segment).
I also take into account an ambient light as an offset for normalization.
Since QPD sum when beam doesn't hit the QPD is roughly 120 counts and when beam hits is 4900 counts, I calculated {(seg left - seg right)*(4900-120)/4900}/{(seg left + seg right)*(4900-120)/4900+120/4900} for YAW, for example.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
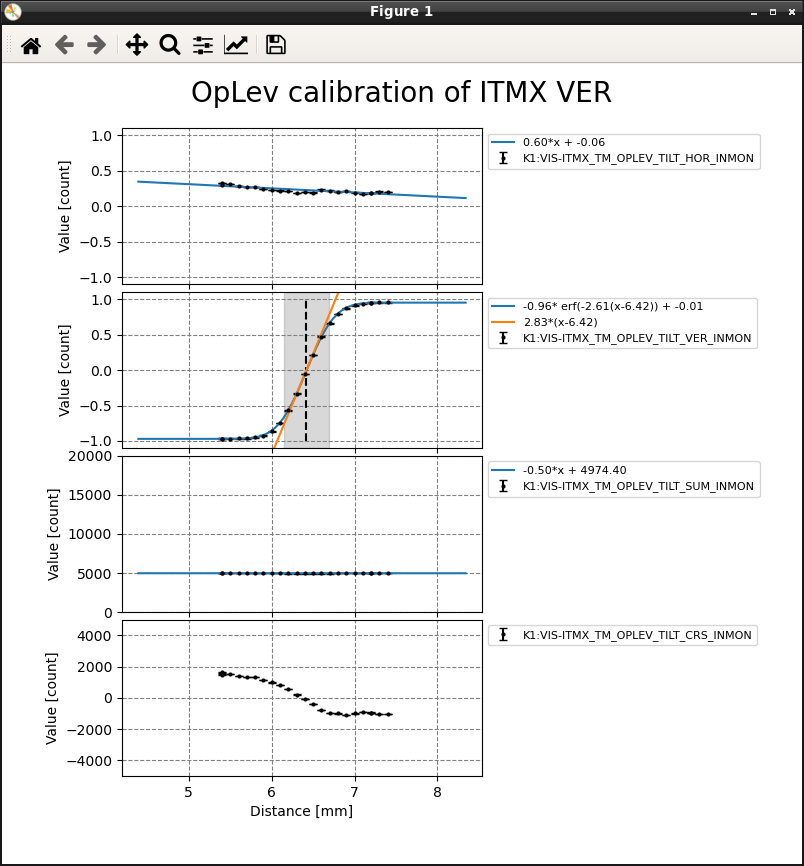
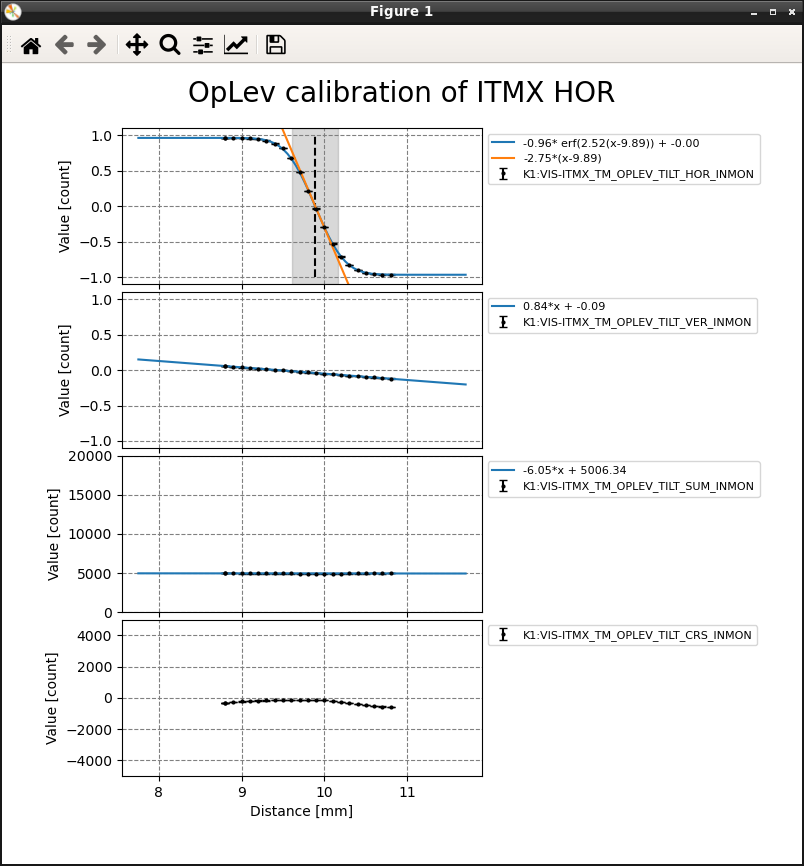
I confirmed that these calibration values are consistent with my calculation in /opt/rtcds/userapps/release/vis/common/scripts/autocommissioning/oplev/calibration.py (commit)
Result is here.
PIT : slope +2.83 [um/cnt], OpLev gain +119.61 [urad/cnt]
YAW : slope +2.75 [um/cnt], OpLev gain +104.86 [urad/cnt]
LEN : slope +10.06 [um/cnt], OpLev gain +418.05 [um/cnt]