Report about the work done yesterday Tuesday 9th of March 2021.
With Hirata-san.
See pictures in album PR3 Remedying Work.
In order to check the health of the IM-Y picomotor we released the IM from touching the IRM temporarily as follows:
- We locked the BF to the security structure.
- We used the IRM lock screws to move the IRM towards yaw negative until the OSEM flags in the horizontal OSEMs looked roughly at the centre.
- We applied sinusoidal actuation signals to the IM DoF and checked that the IM was following freely the signals.
- We moved the IM-Y picomotor and by ∓100 urad without problems.
- Despite the IM being apprently free, we found the RM stop screw heads were touching the security structure in a way consistent with the large negative yaw of the IM
This suggested we could use the picomotor to move the IM from around -3 mrad back to zero.
- We did it and we also adjusted the pitch in the process as there was a large coupling.
- We saw the OSEM flags in the horizontal OSEMs moving towards their centres and becoming free.
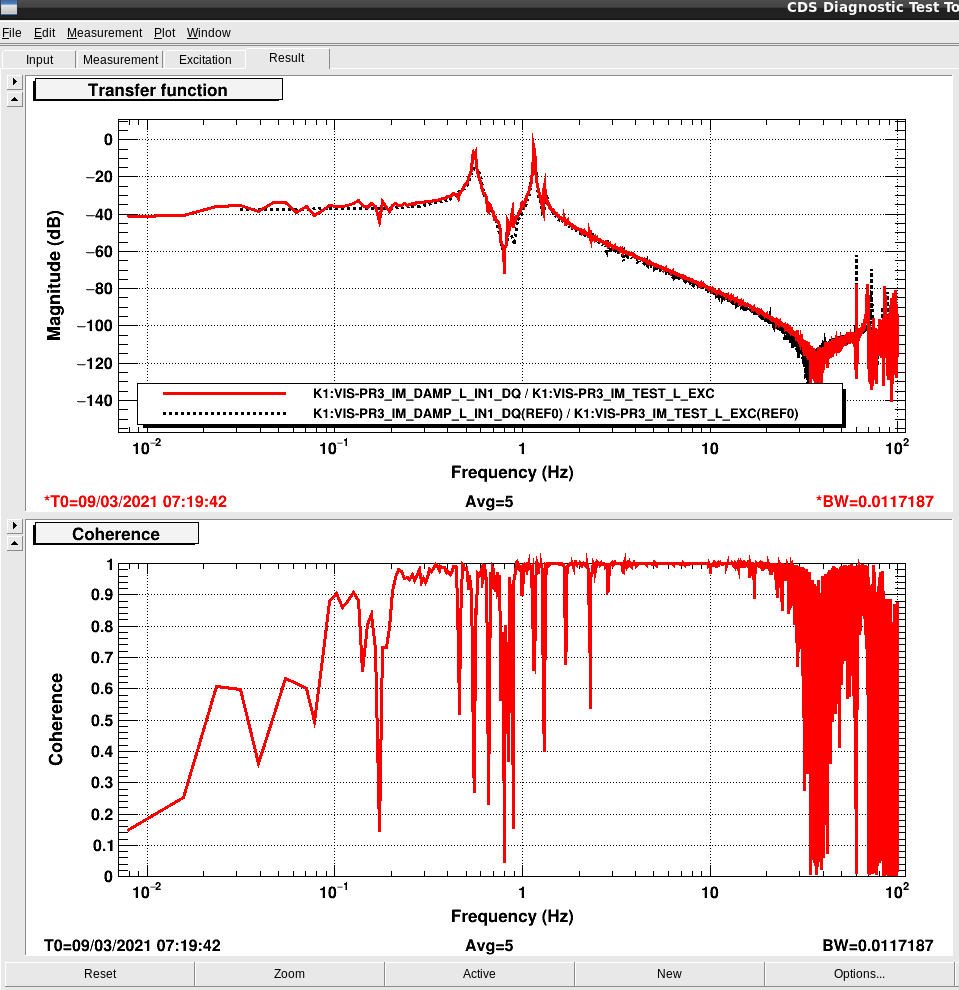
- As soon as we saw H1 looked completely free we measured IM-L transfer function and got a good result. The IM seems to be free now!
- However, the flags should be moved closer to the centre even more and we'll do this on the next session.
Additionally, we modified the clamping of a cable that was almost touching another cable. See this picture of how it looked before.

{kind=link}