With Ikeda-san and Hirata-san
Conclusion: the IM must be touching the IRM; more investigation is needed.
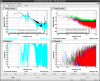
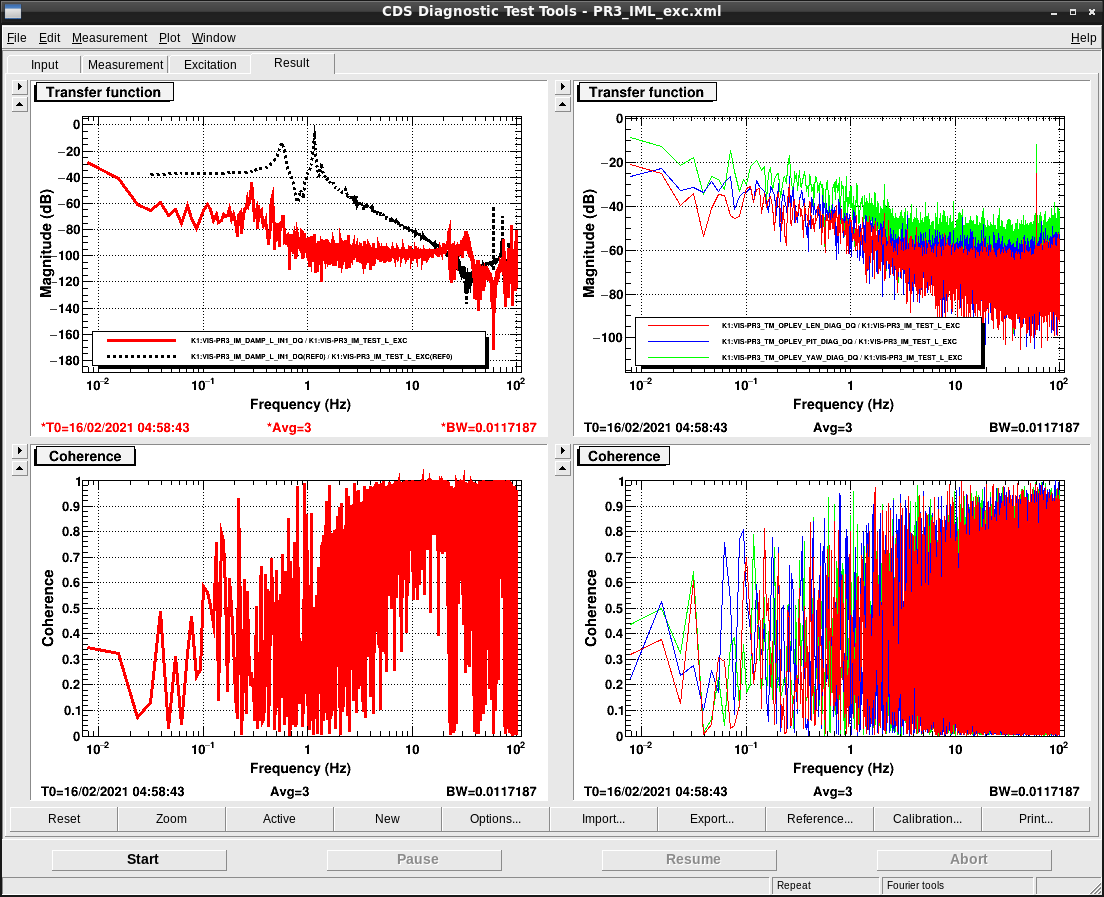
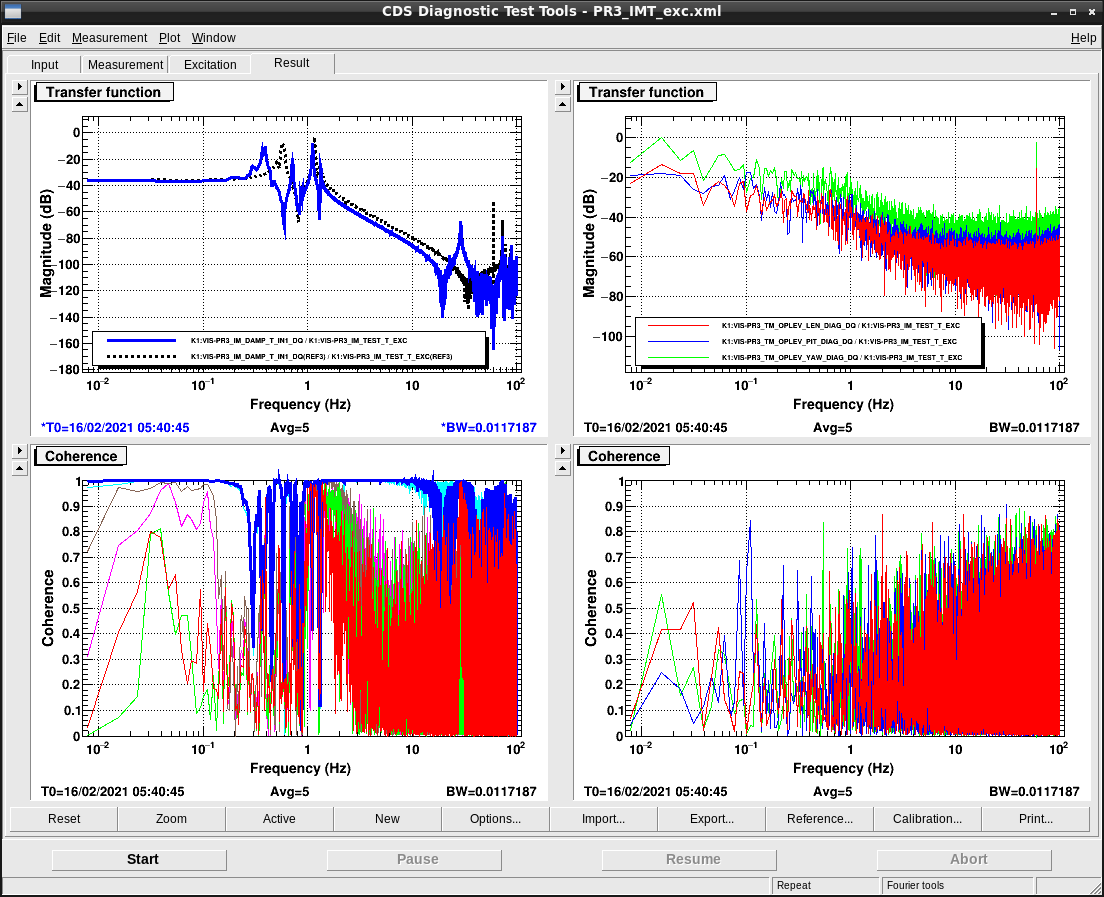
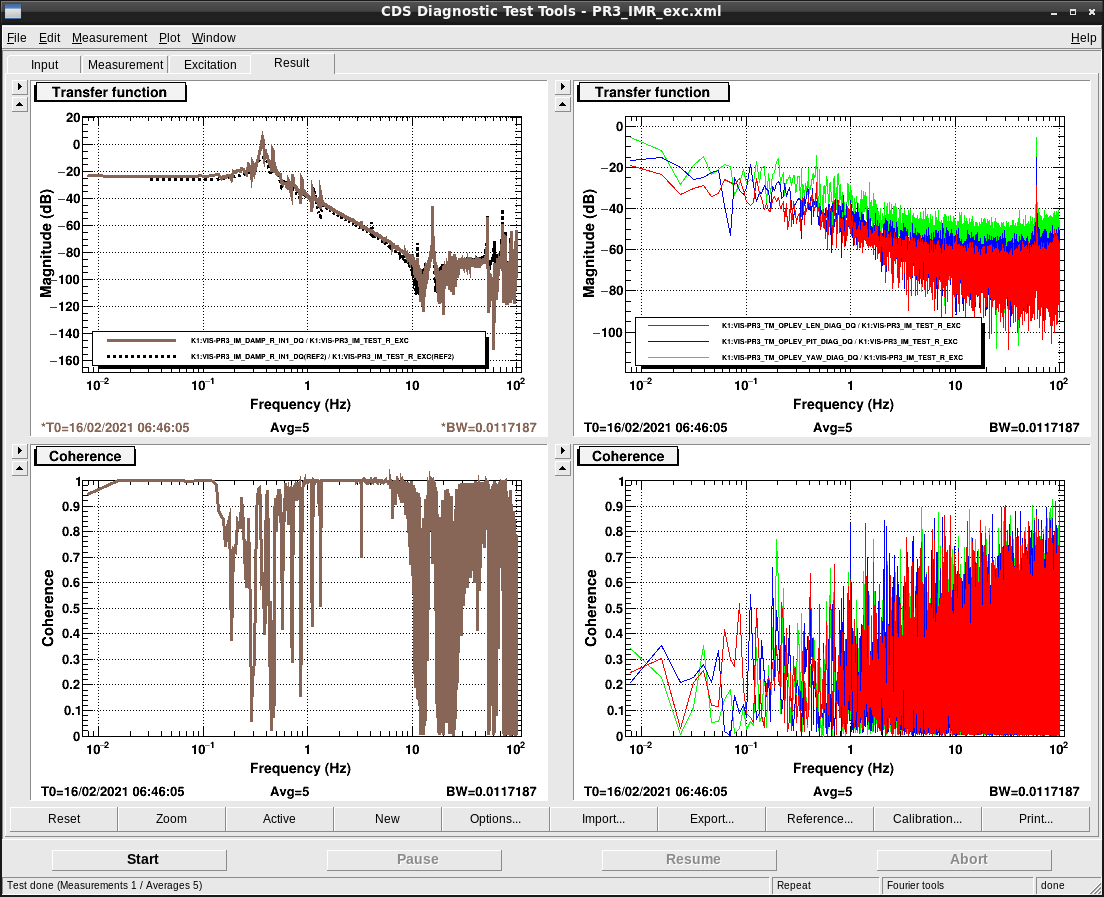
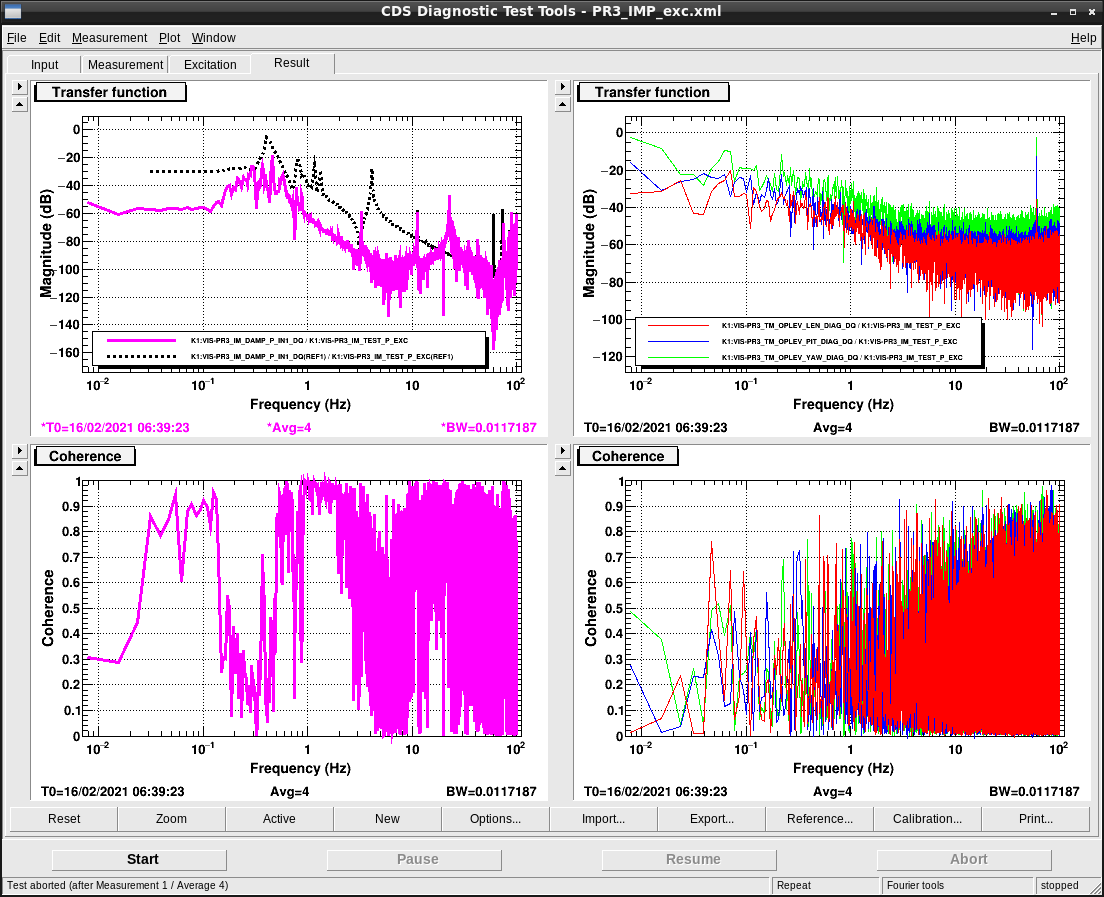
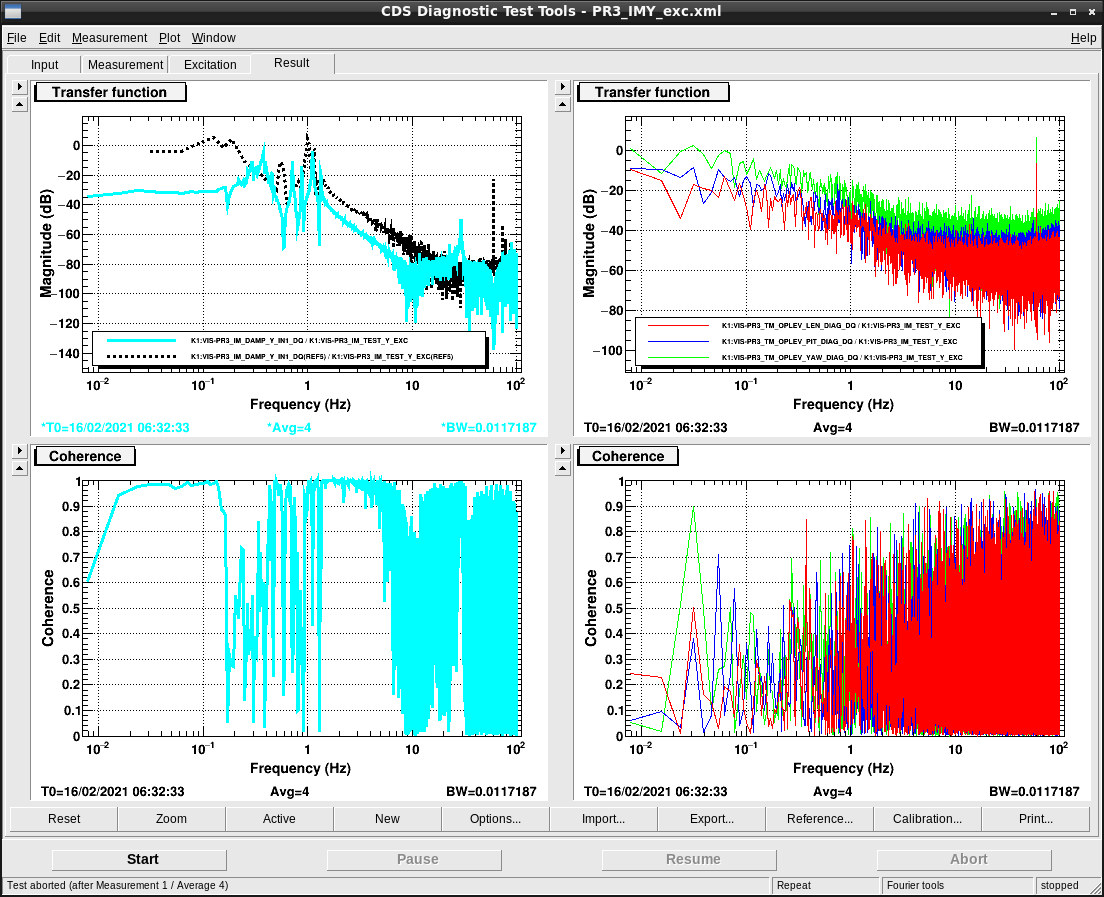
In order to assess the health of the system I measured transfer functions (TF).
- I moved BF keystone roughly to zero using coil-magnet actuation.
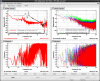
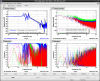
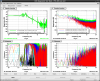
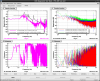
- I measured the six transfer IM functions: all of them were bad except IM-R. See pictures.
-
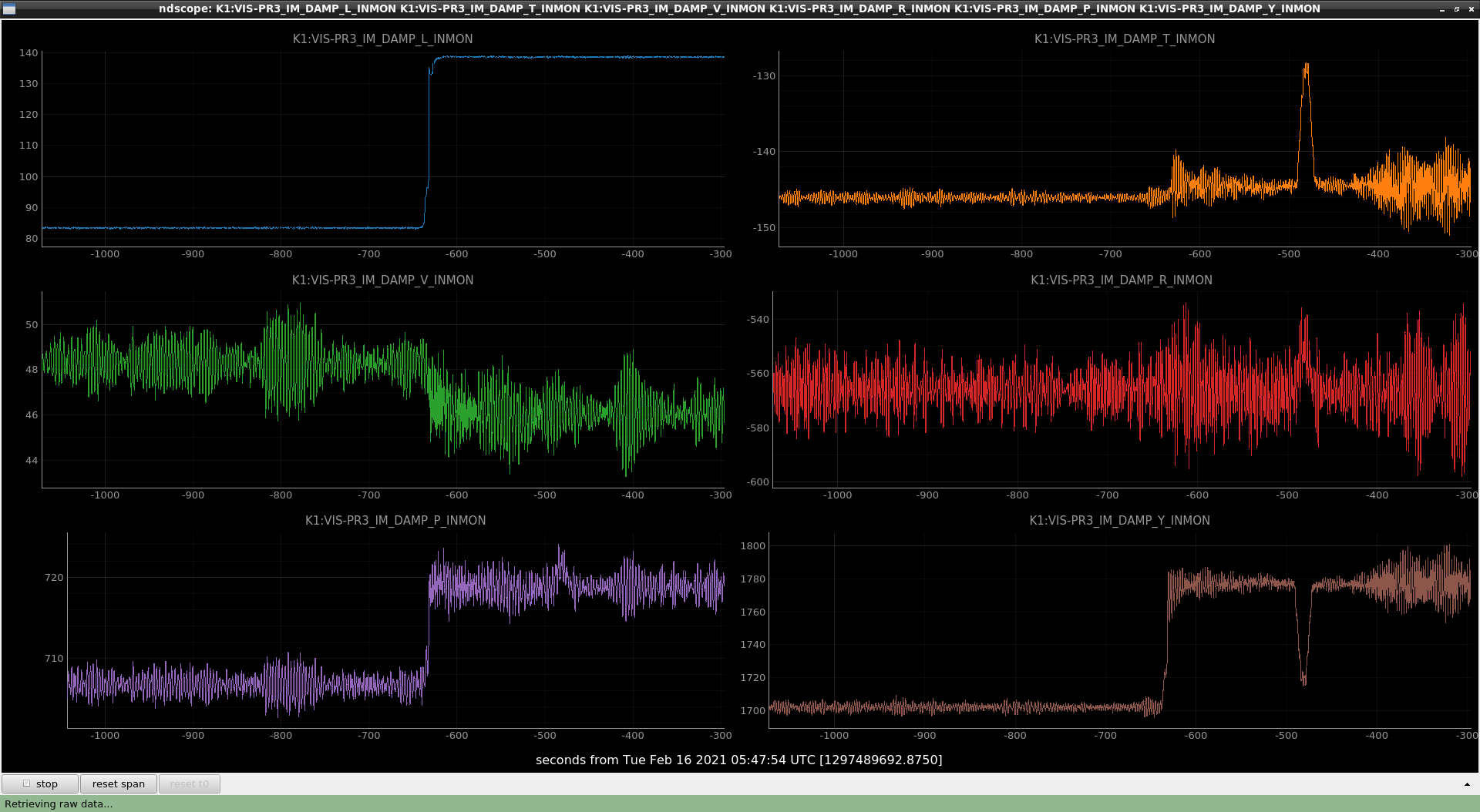
We applied sinusoidal actuation signals along the different degrees of freedom:
- IM-L: no motion ( A = 2000 cnt , f = 0.1 Hz).
- IM-T: there is motion but the TF is not good (A = 1000 cnt , f = 0.1 Hz).
- IM-Y: there is some motion.
- IM-V: there is motion, but I'm not sure it's moving free (A = 1000 cnt , f = 0.1 Hz).
- IM-P: no clear motion (A = 1000 cnt , f = 0.1 Hz).
- IM-R: there is motion (A = 1000 cnt , f = 0.1 Hz).
- In the last picture it is possible the sudden motion along IM-L. This motion was not produced by actuating on it suddenly but gradually. At some point the IM just moved suddenly and didn't come back when the actuation ceased.
The next step would be:
- Use the IM-Y picomotor to set IM-Y closer to zero.
- Measure TFs again.
- In case this does not fix the problem we must inspect the payload visually.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}