[ikeda, fabian-san, hirata-san].
We measured the value of OSEM when the Picomotor of PR3_BF T was unstuck and the motor was moved by the same amount and returned to its original position.
To confirm that the motor is unstuck, the position after turning it by hand from the stuck position was set to 0[count], and the following values were obtained
-After that, we proceeded from -13000 to -43000 in -10000 increments, and then from -52000 to -362000 in -10000 increments.
The amount moved when stacked was 360000 [count], so I was off by 20000, but this was a simple mistake of moving -3000 at first, but only taking -1000 into account and forgetting to take -2000 into account.
Result
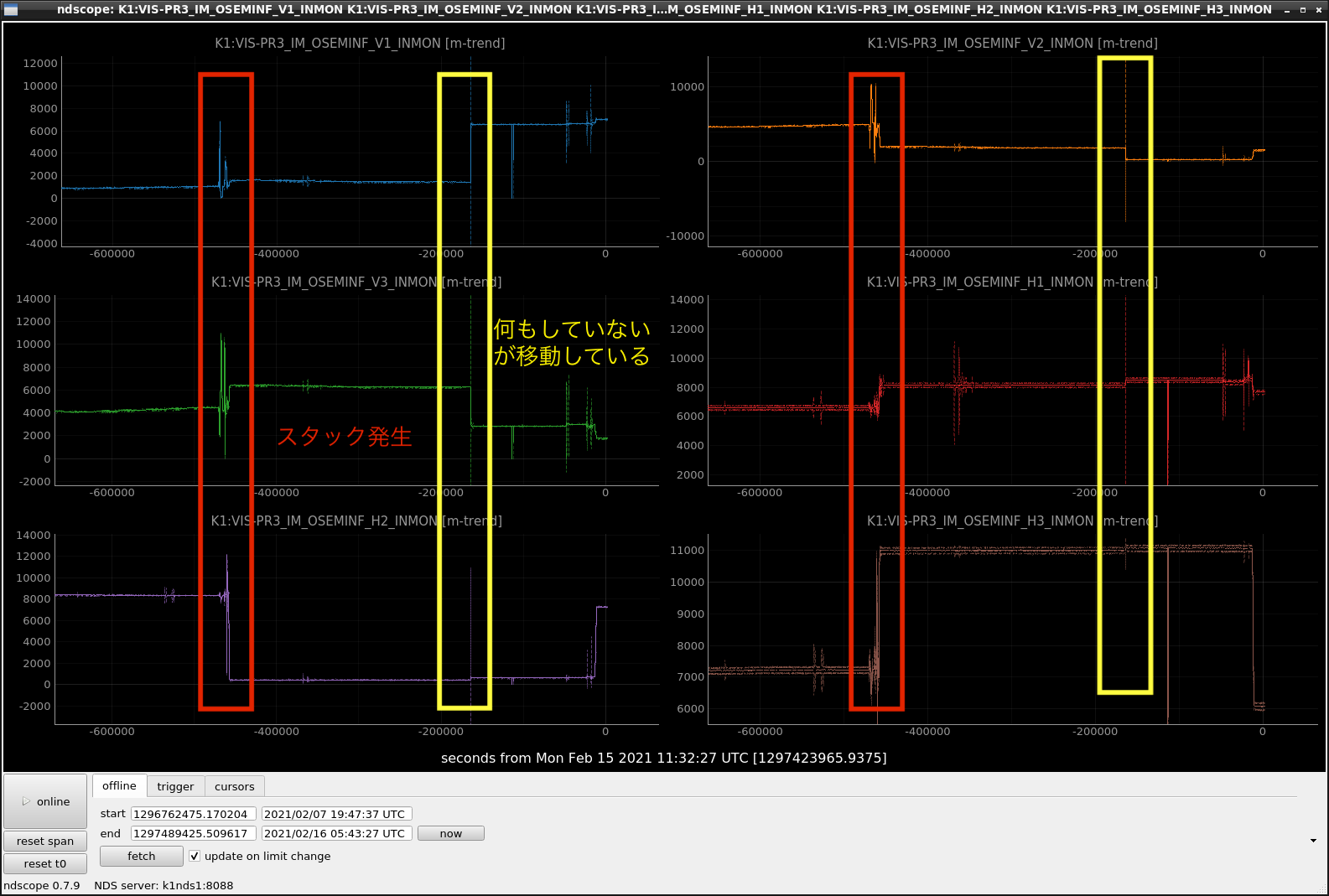
| Start position of K-Log#15976[count] | Before moving[count] | After moving -362000[count] | ||
| K1:VIS-PR3_IM_OSEMINF_V1_INMON | 1070 | 6720 | 7026 | * |
| K1:VIS-PR3_IM_OSEMINF_V2_INMON | 4980 | 300 | 1555 | * |
| K1:VIS-PR3_IM_OSEMINF_V3_INMON | 4490 | 2960 | 1780 | * |
| K1:VIS-PR3_IM_OSEMINF_H1_INMON | 6200 | 8600 | 7680 | |
| K1: VIS-PR3_IM_OSEMINF_H2_INMON | 8620 | 750 | 7260 | |
| K1:VIS-PR3_IM_OSEMINF_H3_INMON | 6980 | 11100 | 6100 |
* V1, V2, and V3 of OSEM are very different.
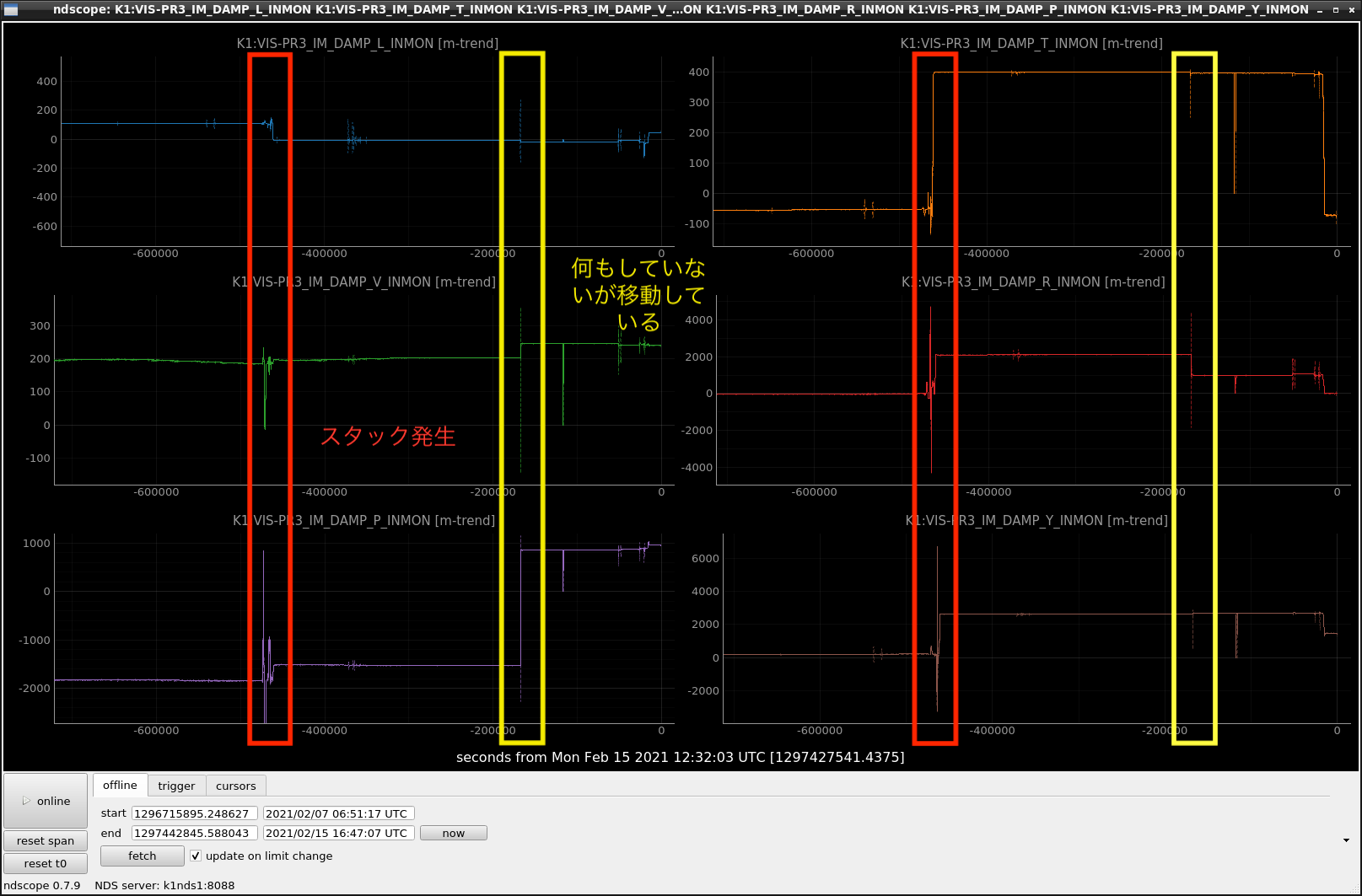
| Start position of K-Log#15976 | Before moving | After moving -362000 | ||
| K1:VIS-PR3_IM_DAMP_L_INMON | 135 | -26 | 45 | [um] |
| K1:VIS-PR3_IM_DAMP_T_INMON | -70 | 394 | -70 | [um] |
| K1:VIS-PR3_IM_DAMP_V_INMON: | 188 | 242 | 240 | [um] |
| K1:VIS-PR3_IM_DAMP_R_INMON | -30 | 1030 | 0 | [urad] |
| K1:VIS-PR3_IM_DAMP_P_INMON | -1760 | 892 | 962 | *[urad] |
| K1:VIS-PR3_IM_DAMP_Y_INMON | 180 | 2660 | 1480 | *[urad] |
K1:VIS-PR3_IM_DAMP_Y_INMON: 180 2660 1480 * Pitch and Yaw are now at very different positions than before the start of K-Log#15976.
We checked the data from the time the stack was generated until before it was moved, and found that the position changed around 23:09 (JST) on 2021/02/13.
Pitch is way off at this time.
I would like to discuss how to proceed with this before proceeding.
[Data]
/kagra/Dropbox/Personal/ikeda/VIS/K-Log/20210215/




{kind=link}
{kind=link}
{kind=link}
{kind=link}