[Miyo, Takahashi]
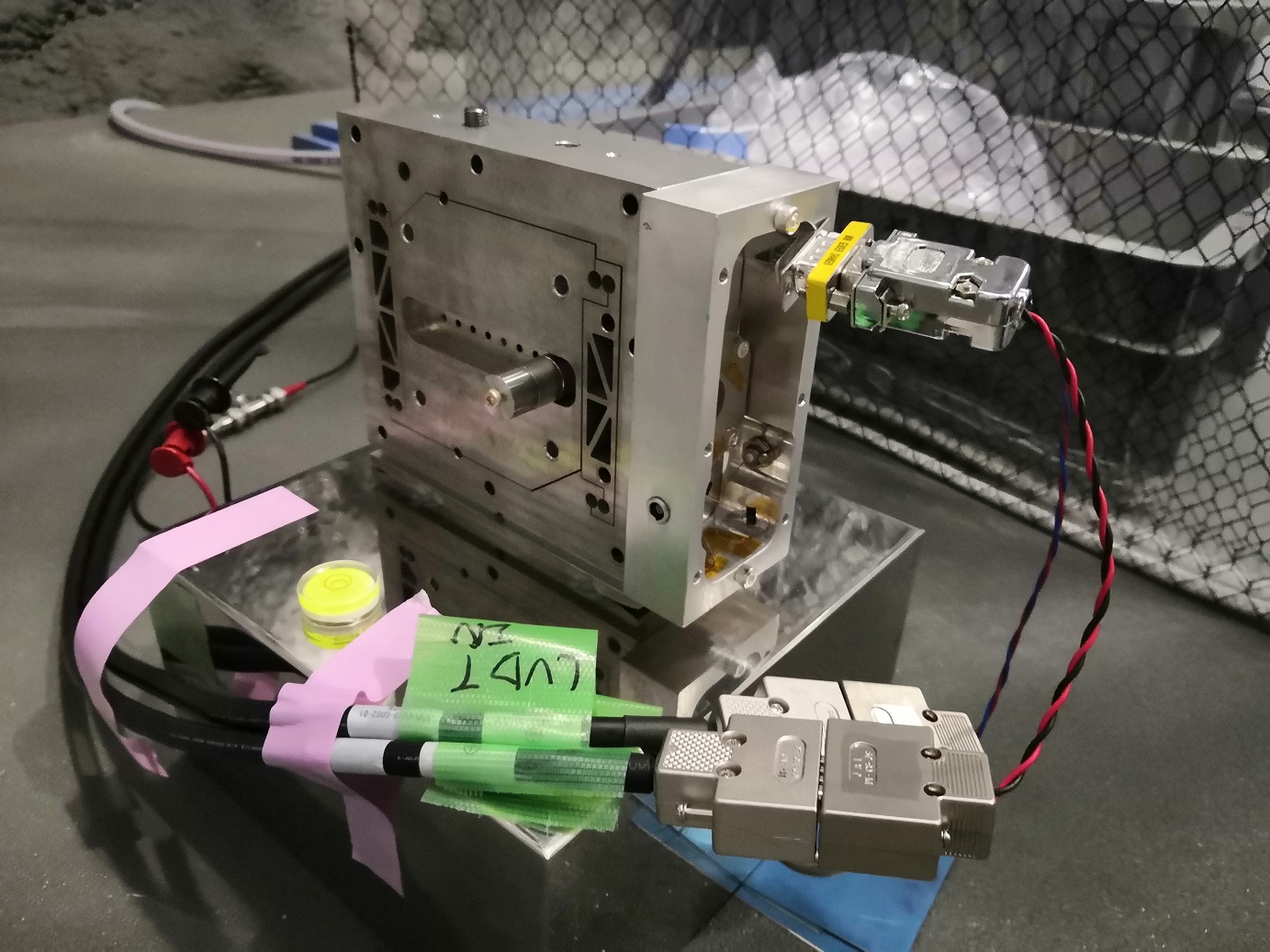
We started the test of the ACC with LVDT sensor. The ACC was put on the 30-kg SUS block. The tilt was adjusted by shim. Gain of LVDT driver was adjusted (CW 5 turn). Modified low power coil driver (Max. 9.4mA) was used for the actuator.
Setting parameters
- Counter weight: Cylinder x5 -> 0.3Hz, Cylinder x4 + Rectangular x1 -> 0.24Hz
- Resistance of actuator coil: 3Ω + 47Ω(resistor)
Counter weight: 13g x5 -> 0.3Hz, 13g x4 + S ->0.24Hz
Resistance of actuator coil: 3Ω + 47Ω.
Modified low power coil driver was used. MAX. current is 9.4mA.
ACC was put on the 30k-g SUS block. The tilt was adjusted by shim.
Gain of LVDT driver was adjusted (CW 5 turn).
Counter weight: 13g x5 -> 0.3Hz, 13g x4 + S ->0.24Hz
Resistance of actuator coil: 3Ω + 47Ω.
Modified low power coil driver was used. MAX. current is 9.4mA.
ACC was put on the 30k-g SUS block. The tilt was adjusted by shim.
Gain of LVDT driver was adjusted (CW 5 turn).
Counter weight: 13g x5 -> 0.3Hz, 13g x4 + S ->0.24Hz
Resistance of actuator coil: 3Ω + 47Ω.
Modified low power coil driver was used. MAX. current is 9.4mA.
ACC was put on the 30k-g SUS block. The tilt was adjusted by shim.
Gain of LVDT driver was adjusted (CW 5 turn).
Counter weight: 13g x5 -> 0.3Hz, 13g x4 + S ->0.24Hz
Resistance of actuator coil: 3Ω + 47Ω.
Modified low power coil driver was used. MAX. current is 9.4mA.
ACC was put on the 30k-g SUS block. The tilt was adjusted by shim.
Gain of LVDT driver was adjusted (CW 5 turn).
Counter weight: 13g x5 -> 0.3Hz, 13g x4 + S ->0.24Hz
Resistance of actuator coil: 3Ω + 47Ω.
Modified low power coil driver was used. MAX. current is 9.4mA.
ACC was put on the 30k-g SUS block. The tilt was adjusted by shim.


{kind=link}
{kind=link}