With Okutomi-san, Washimi-san, Uchiyama-san and Yokozawa-san,
In case you don't see the plots, please click here.
As far as I understand the symptoms are the following:
- The damping control system on the optic, which employs the oplev signal, saturates. The actuation limit was 10,000 counts and I changed it to 15,000 counts just to check whether it would work. However, it kept saturating.
- The orientation of the mirror was wrong according to the main interferometer alignment because there was not signal reaching the AS table.
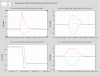
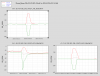
We checked the oplev signal and found that
- The beam position on the QPD changed as shown in the plots of the first figure. Three out of four channels changed by relatively small amount, with the exception of K1:VIS-SR2_TM_OPLEV_LEN_YAW_OUTPUT, which changed from -11 ndu to -74 ndu (normalized displacement units).
-
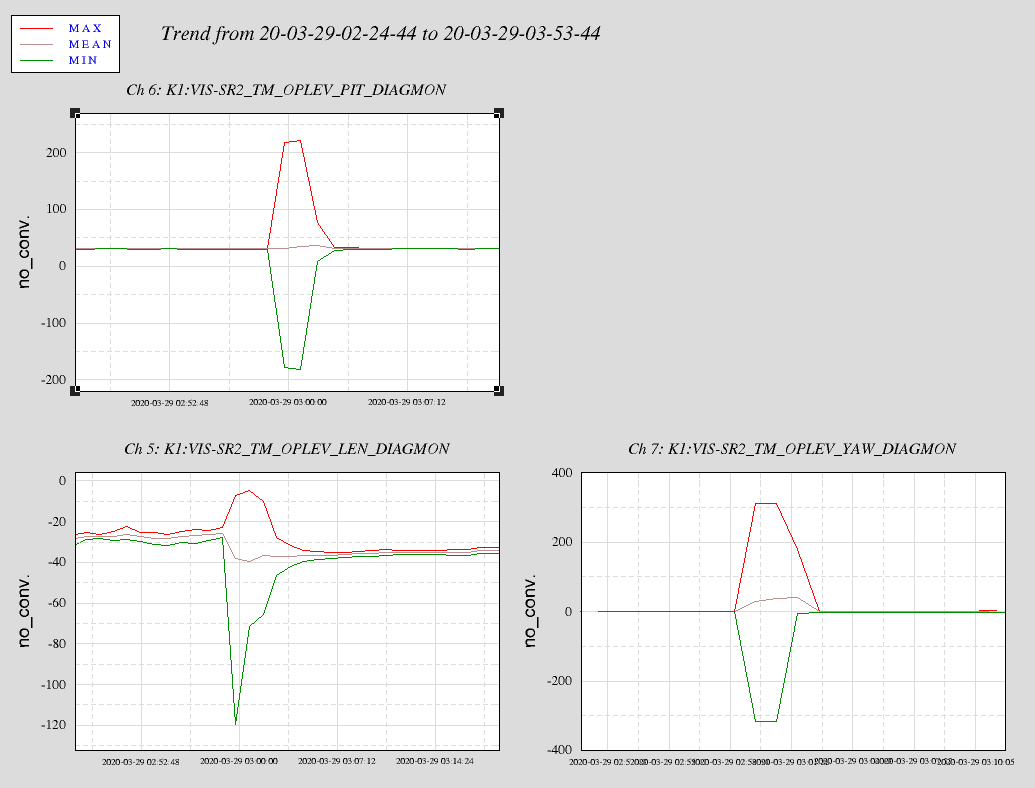
The change in the diagonalized values are shown in the second figure to be
- K1:VIS-SR2_TM_OPLEV_LEN_DIAGMON: from -26 um to -35 um.
- K1:VIS-SR2_TM_OPLEV_PIT_DIAGMON: NO APARRENT CHANGE.
- K1:VIS-SR2_TM_OPLEV_YAW_DIAGMON: NO APPARENT CHANGE.
I would do the following observations:
- The K1:VIS-SR2_TM_OPLEV_LEN_YAW_OUTPUT reads -74ndu, which is out of linear range (-50 ndu to 50 ndu is the linear rabge). I'm not sure how important this is rigjht now.
- The readout in pitch and yaw didn't seem to have changed.
To Do:
- Check when the change in the oplev channel happened with respect to the hammering test.
- When the saturation of TM actuaton happened.
I way forward would be just to center the QPD.
{kind=link}
{kind=link}