[Enomoto, Nakano]
We changed the configuration of the IMC length control, and it seems much better than before.
The main change is an output port to a laser PZT. It connected the FAST OUT of a common mode servo, but now the SLOW OUT. The difference between those two output is a second order HPF at 5 Hz. Because FAST OUT has a HPF, a cross-over frequency couldn't go down below 30 Hz.
The MCe suspension actuator has a coupling between length and yaw, so if the MCe suspension was pushed so much it would start to shake in yaw direction and that make unstable the IMC lock. Actually we saw the control signal to the MCe suspension got increased between some Hz to 100 Hz when the IMC lock got unstable.
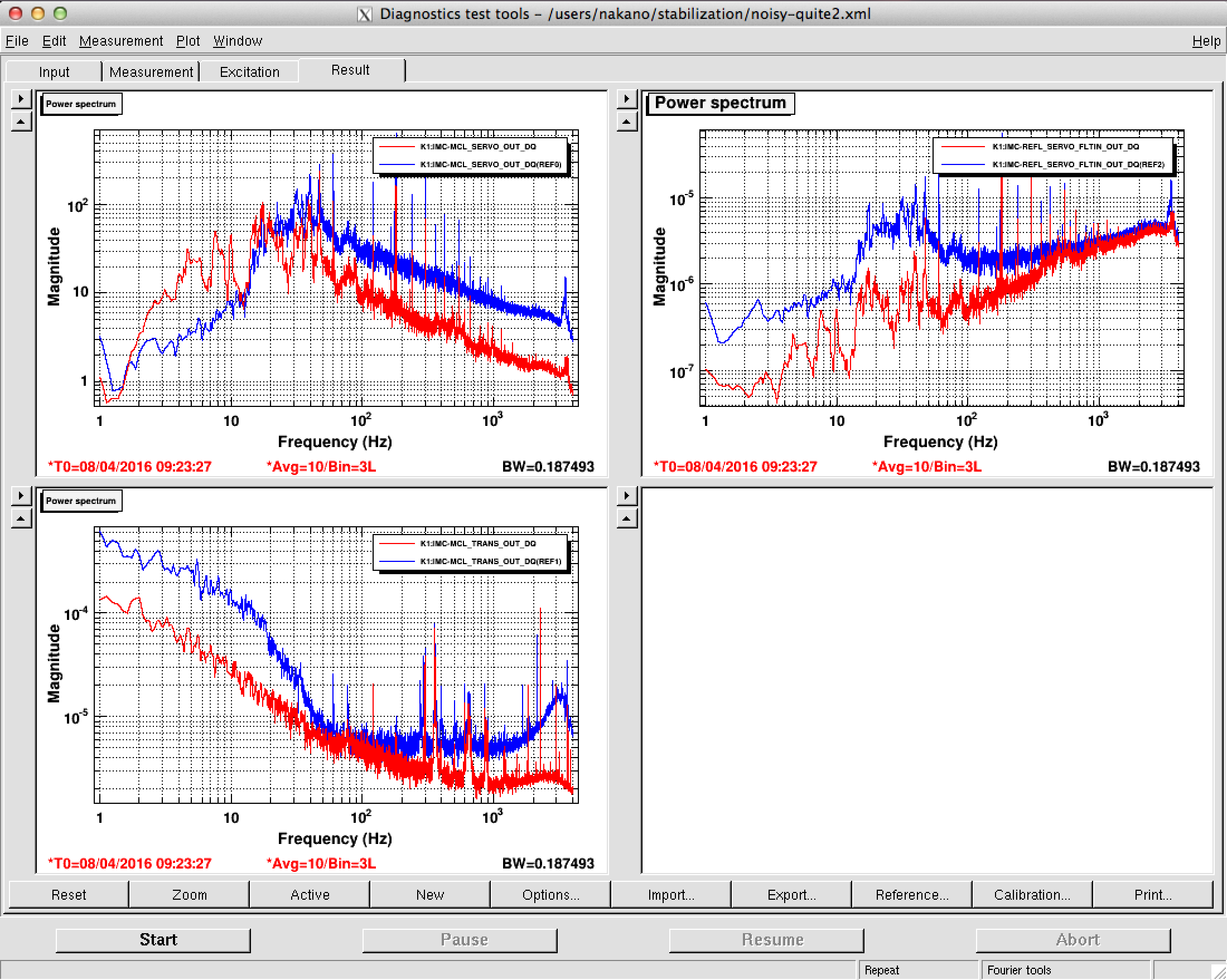
So we wanted to decrease the cross-over frequency to offload the feedback of the suspension to the PZT. Now we removed the zero at 5 Hz, and the cross-over frequency get down to 10 Hz. I forgot to measure the spectrum to compare the two configuration, but we saw even in the StripTool that the control signal to the MCe suspension get much smaller than before.
Also the boost helps a lot between 4 Hz to 400Hz. Because of some reasons, we couldn't turn on it but now we can.
We will see how stable this configuration is tomorrow, And the cross-over frequency has not been optimized yet, so we would do that.
Questions,
The control signal to the suspension seemed to have a DC drift. We are not sure that is the drift or very slow oscillation, but it might be the reason to lost a lock. The PMC SLOW signal would tell us which, the cavity length or the frequency, might be drifting.
{kind=link}