Since PR3 actuator balancing doesn't look done yet, I did it.
*****Method*****
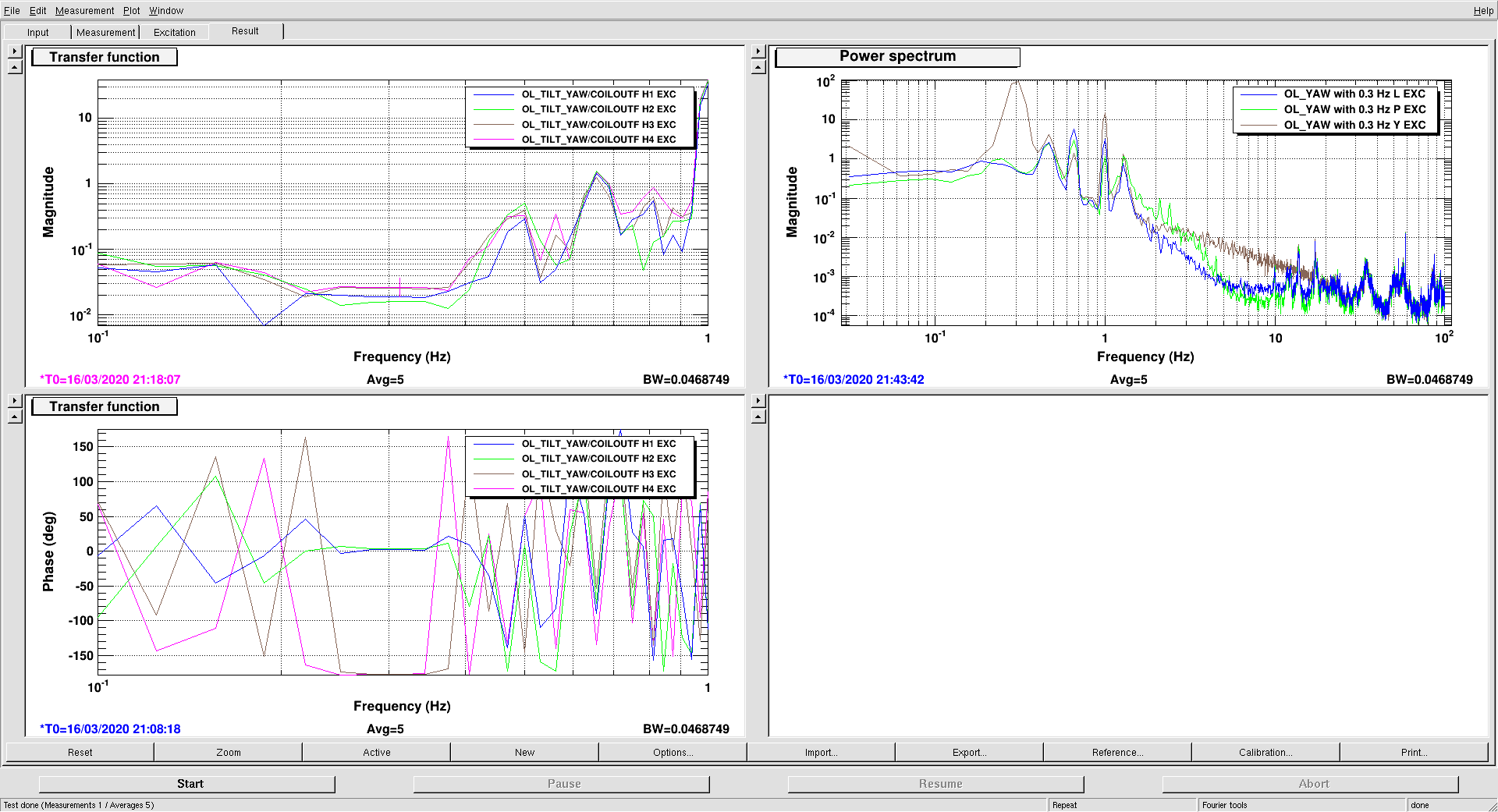
I injected 500 counts sin signal at 0.3 Hz on each COILOUTF EXC on TM stage(H1, H2, H3, and H4) and measured the TF from EXC to TM_OPLEV_TILT_YAW_OUT_DQ at excitation frequency.
After that, I calculated the ratio between TFs of H, H2, H3, and H4.
I modified the COILOUTF gain to mitigate the difference of TFs.
I normalized the gain by the largest gain so that the maximum gain is 1.
After this modification, I injected 500 counts sin signal at 0.5 Hz fron TM_TEST_L, TM_TEST_P, and T_TEST_Y.
*****Result*****
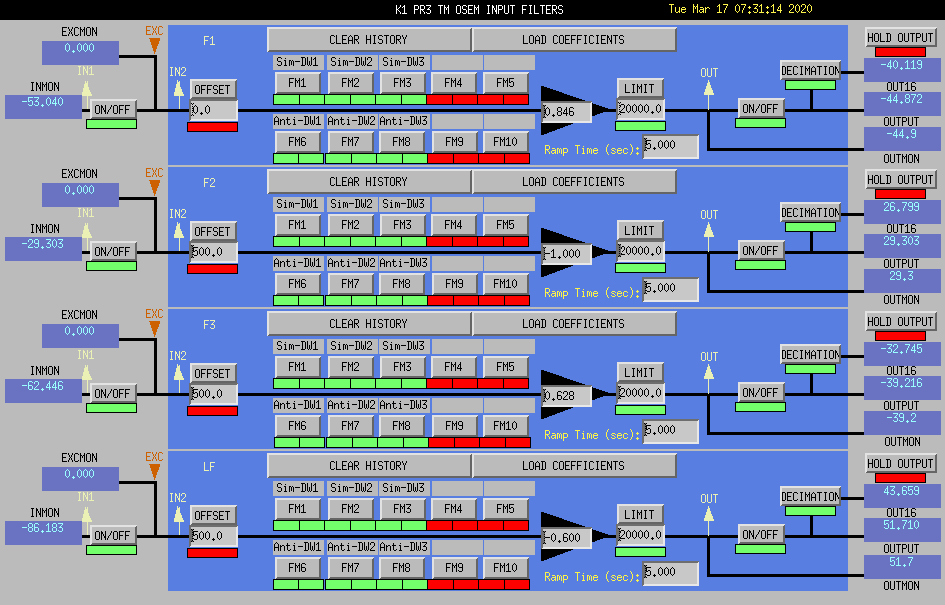
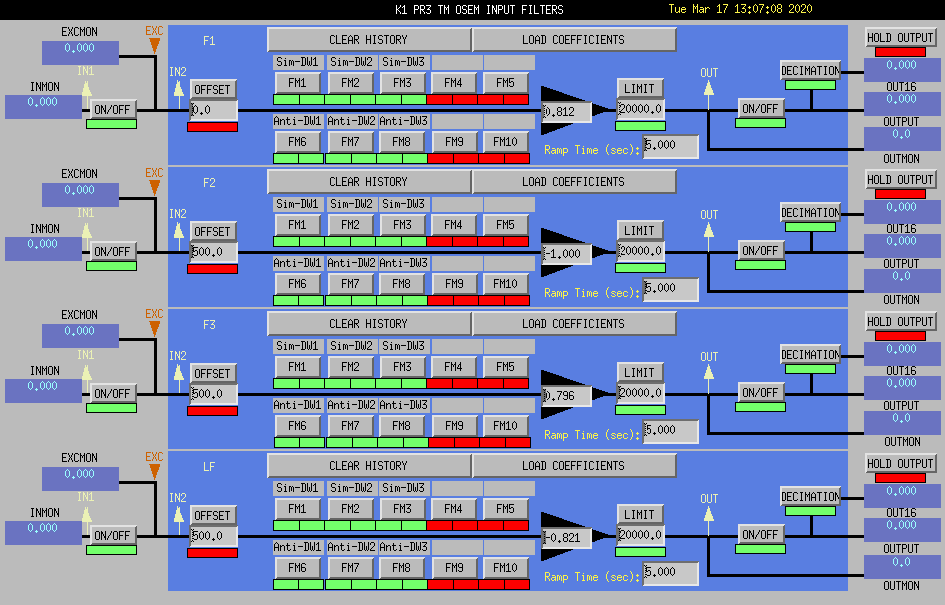
Gain ratio; H1:H2:H3:H4 = 0.846:-1:0.628:-0.6
Attachment 1 is TF measurement result and spectra after the gain modification.
Attachment 2 is the latest COILOUTF filter of PR3-TM stage.
Note: XML file is stored at /users/Comissioning/data/VIS/PR3/TM_actuator_DIAG_20200317.xml




{kind=link}
{kind=link}
{kind=link}
{kind=link}