Summary
I estimated the DC readout shot noise. It seems to be the limiting noise for frequencies above 300Hz.
Estimation method
In this explanation, I denote the output of the K1:OMC-TRANS_DC_SUM filter bank as the DC readout error signal (Verr).
The photo current Ipd is converted to V_err with the following relation:
Verr = Cmw * Cadc * Gdiff * Z * Ipd = Gpd * Ipd
Cmw: 1.7e-3, A factor to convert cnt to mW in each PD's input filter banks.
Cadc: 3276.8 cnts/V, ADC conversion factor
Gdiff: Gain 2 by a conversion from single ended to differential signal
Z: 100 Ohm, Transimpedance
Gpd = Cmw*Cadc*Gdiff*Z = 1114.1 [cnts/A]
The shot noise current In is:
In = sqrt(2*q*Ipd_dc) = sqrt(2*q*Verr_dc/Gpd)
The shot noise at Verr is,
Verr_noise = Gpd*In = sqrt(2*q*Gpd*Verr_dc) = Gshot * sqrt(Verr_dc), where Gshot = sqrt(2*q*Gpd) = 1.89e-8
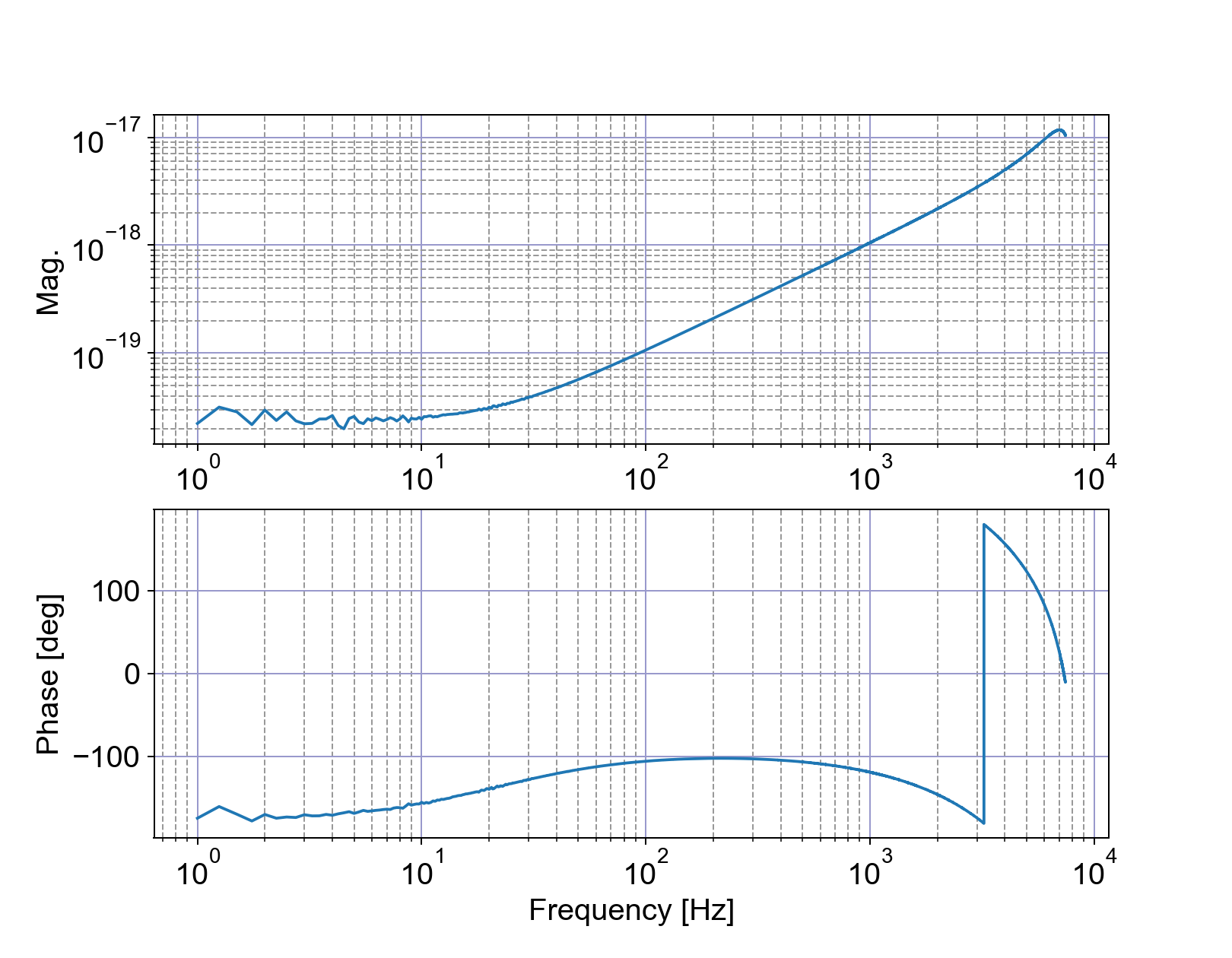
Now this noise is calibrated to the displacement with a factor of 1/C, where C is the optical gain.
I measured the currently used 1/C by taking the ratio of K1:CAL-CS_PROC_DARM_FILT_WHITEN_OUT to K1:LSC-OMC_DC_IN1.
Actually, there is a strong whitening filter before K1:CAL-CS_PROC_DARM_FILT_WHITEN_OUT. This filter was factored out.
gshotoverc.txt is the overall calibration factor (Gshot/C) to be multiplied with sqrt(Verr_dc) to get the shot noise contribution to DARM displacement.
Estimated shot noise
Using Verr_dc = 8, the estimated shot noise is plotted along with the current best sensitivity (594kpc).
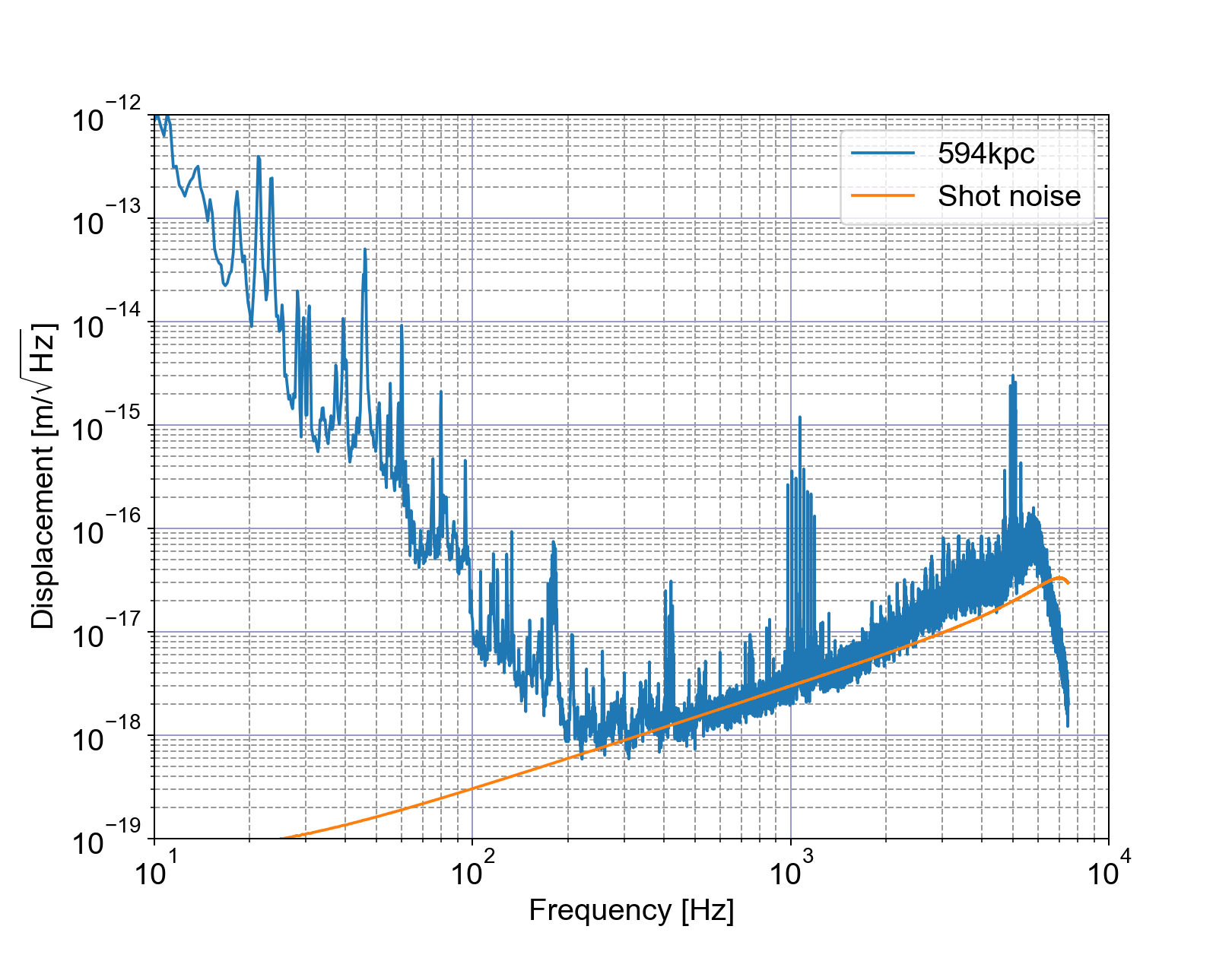
It seems that we are limited by the shot noise from 300 to 2kHz.
We need squeezing :-)
{kind=link}
{kind=link}