= One suggestion for the current operation period (especially for O3 era) =
- If we can accept the low frequency drift (below ~20 mHz), we have a chance to suppress the microseismic contribution by using feed-forwarding: we can send the seismometer signal to the IP-actuators.
- Figure 1 (left): expected sensor noise coupling to the TML displacement when only the sensor-correction is used at IP-stage
-
Figure 1 (right): expected sensor noise coupling to the TML displacement when both the sensor-correction and the feed-forwarding is used at IP-stage
- (black, red, blue, magenta) = (ground motion, TML (w/ control), TML (w/o control), noise coupling from IP-LVDT)
- By using both the sensor-correction and the feed-forwarding we can have further suppression compared to the case only sensor-correction is used.
- In Figure 1 (right), TML amplitude at around 150 mHz is larger than the sensor noise coupling from IP-LVDT. This is due to vertical-to-horizontal coupling (assuming the coupling ratio is 1%). In this calculation the vertical controls were not engaged. Thus we might be able to have more suppression at the frequencies comapred to Figure 1 (right).
- By using feed-forwarding, maybe we can have further suppression even if the sensor correction is imperfect.
-
What I did in this simulation:
-
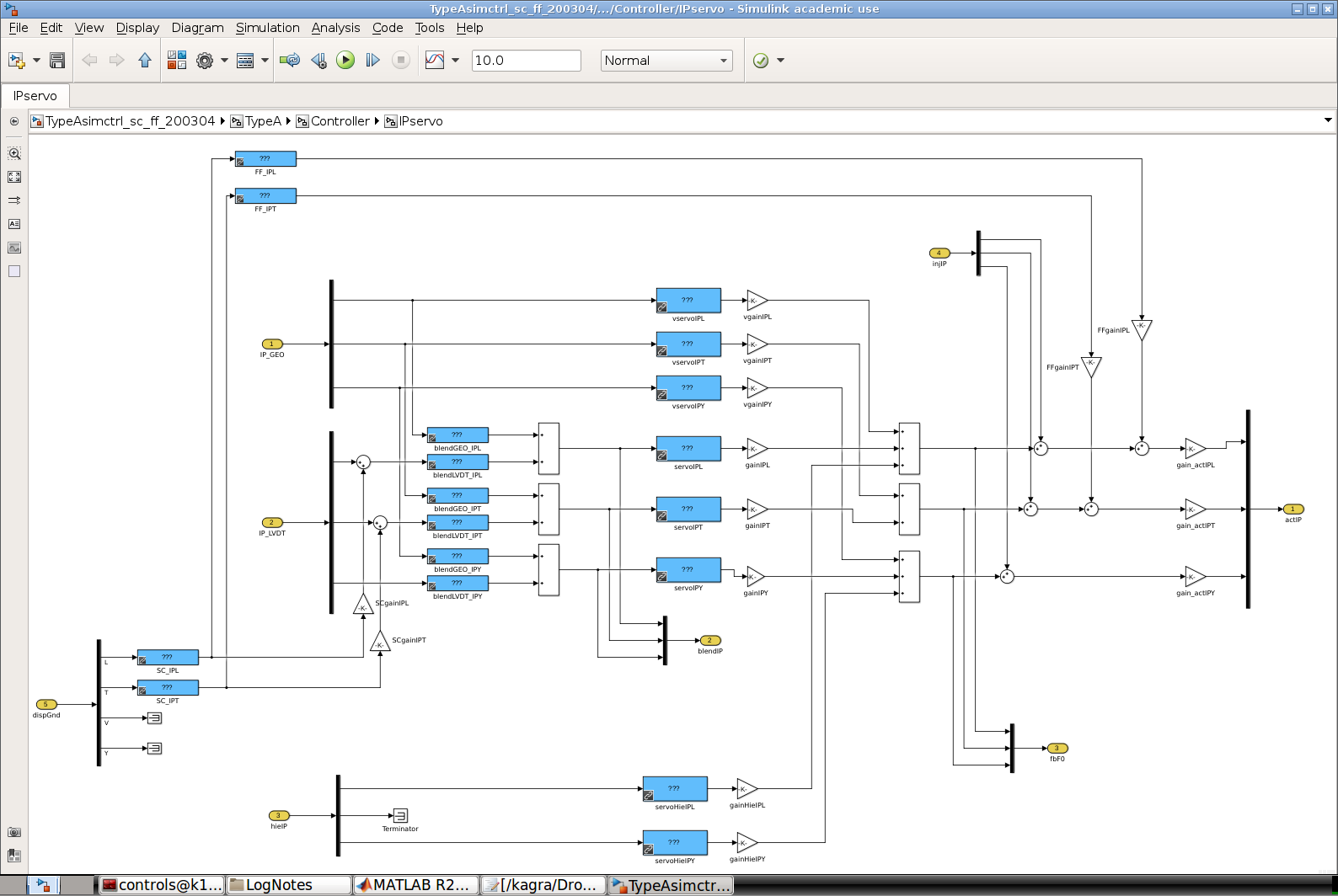
send the output signal of the sensor correction filter to the IP-actuator after multiplying a factor as shown in Figure 2.
- An in verse of dc-gain of force transfer function is used for the factor. In the Figure 2 case, FF_IPL and FFgainIPL is set to 1.
-
send the output signal of the sensor correction filter to the IP-actuator after multiplying a factor as shown in Figure 2.
- Figure 1: in pdf
- Figure 2: in png

{kind=link}