[Ushiba, Kokeyama]
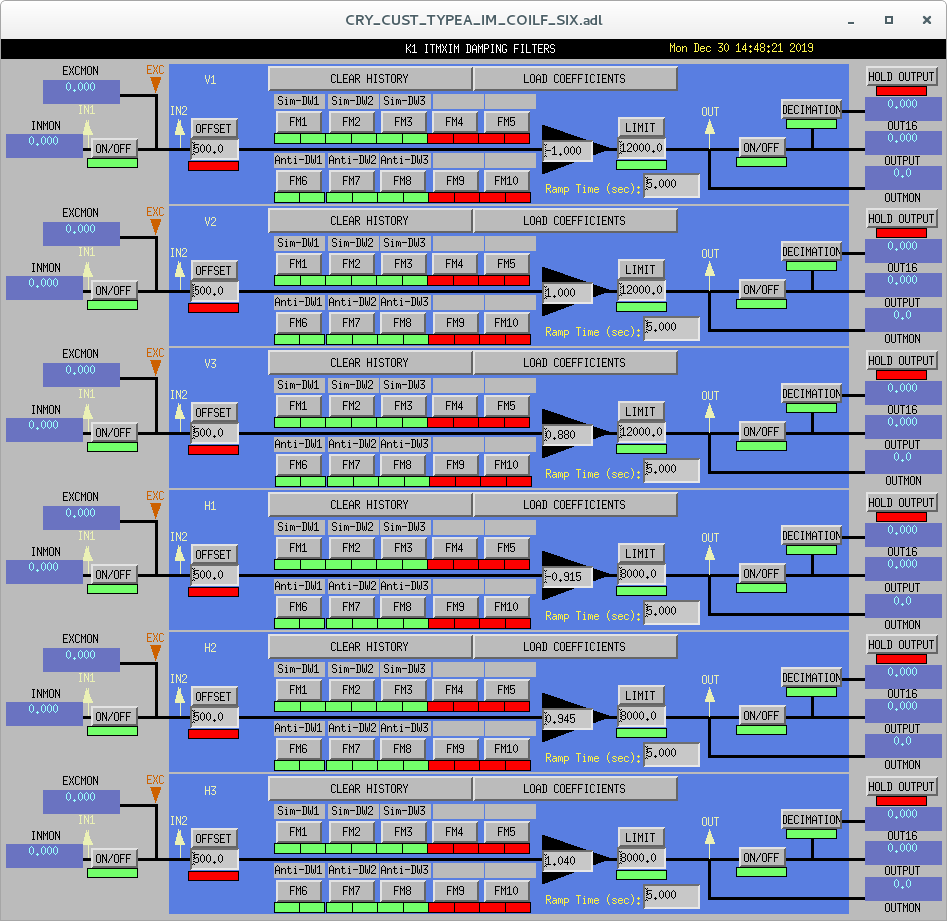
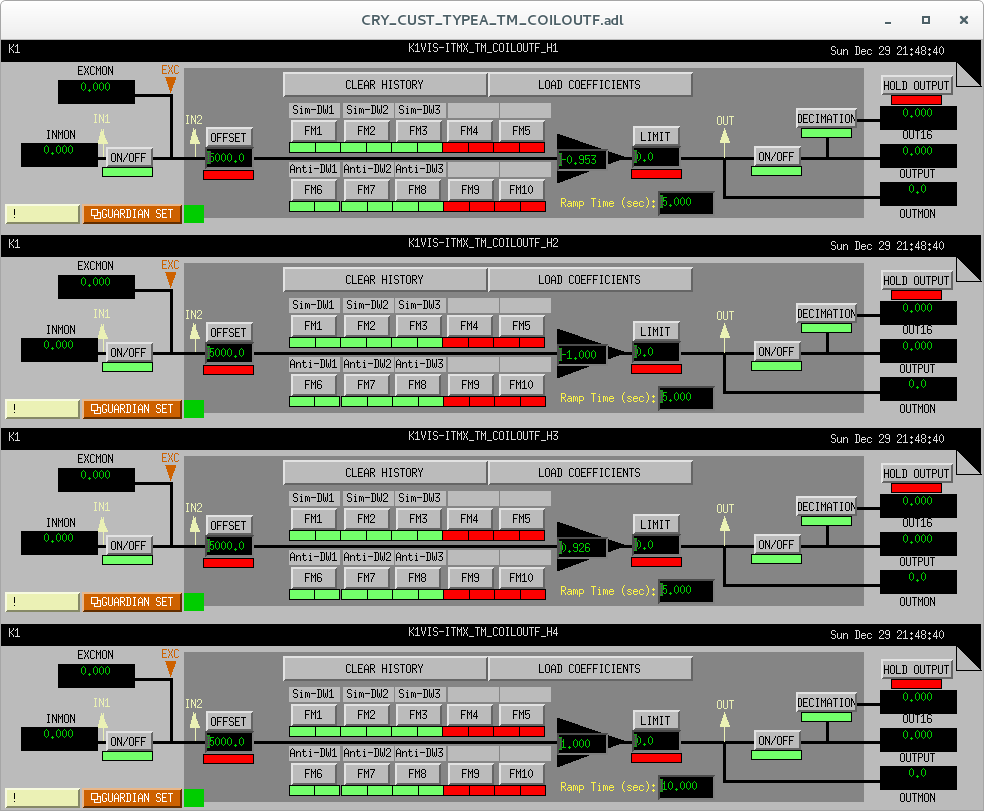
Related to this post, ITMX coil balancing was done after the coil driver change of the payload part.
Attached screenshots are the resulting balancing gains. The balancing methods are following:
V1 and V3: balanced by looking at PIT.
H1 and H2: balanced by looking at YAW.
H3 is balanced so to cancel TEST_YAW (which is H1+H2).
V2 value is not changed.
MN: Balanced by DC stepping. One step is 500 cts.
IM: Balanced by 4Hz exc, 1500 cts.
IM: Balanced by 10Hz, 8000~11000cts.



{kind=link}
{kind=link}
{kind=link}