FPMI came back and the sensitivity has been improved by order of 1.5 at high frequencies. The inspiral range is 8.5 kpc at the maximum.
--------
1. ALS-PDH gain tweaking
I found that the gain of the GR PDH loops was too high. Figure 1 shows the ALS CARM OLG. You can see the loop shape with previous gain in klog11269. It shows there is a peak at 40 kHz, and it limited the bandwidth below 1kHz. It comes from the PDH loop and I reduced the servo gain by 12 dB and the peak got small. Now the UGF of the ALS CARM loop is several kHz.
I guess this fragile loop might causes daily instability of our interferometer. Actually the fluctuation of the GR TRANS has gone away after the gain tweak. Also, the ALS DARM signal got more quite.
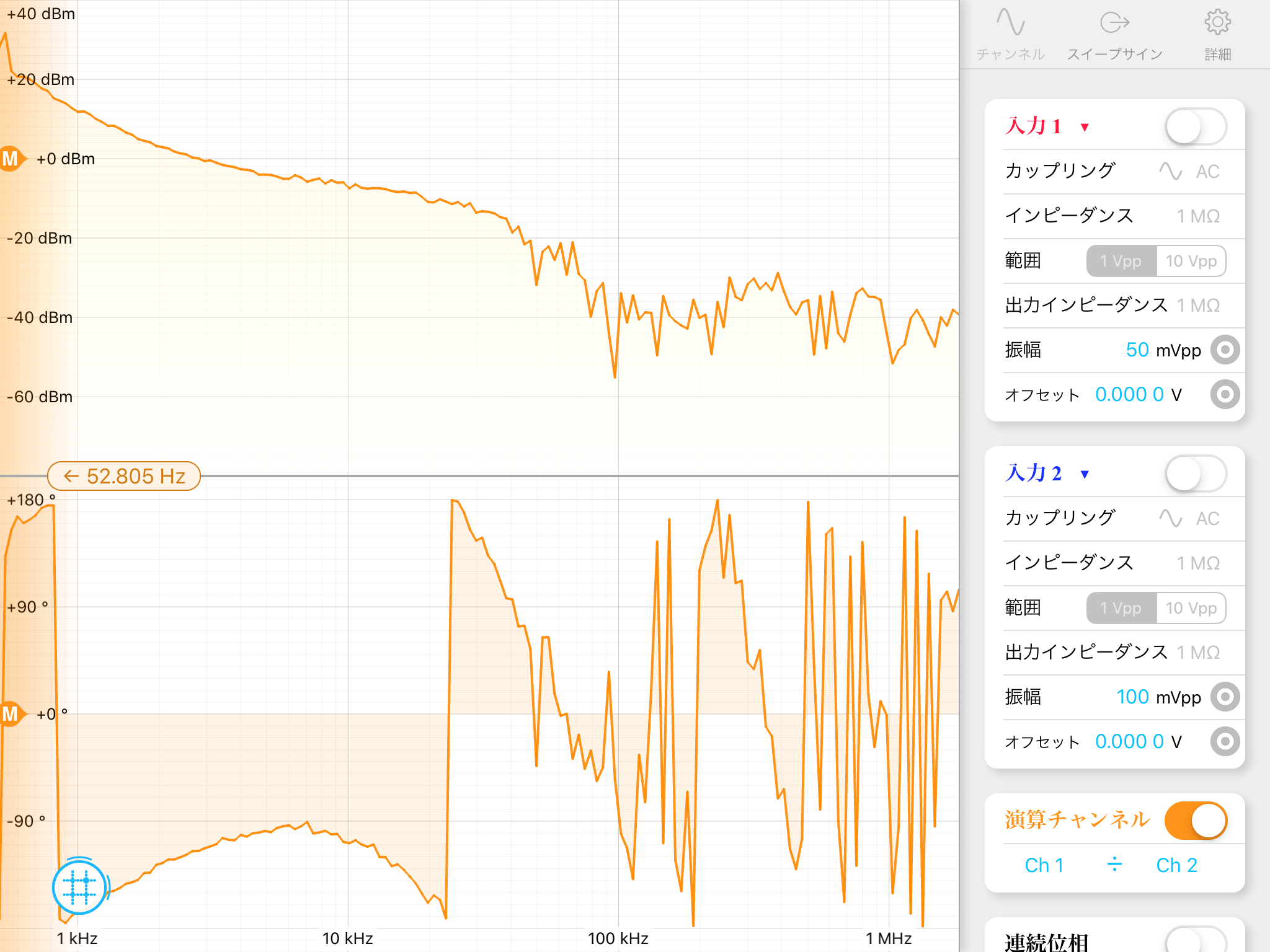
Fig. ALS CARM OLG
2. High-frequency improvement.
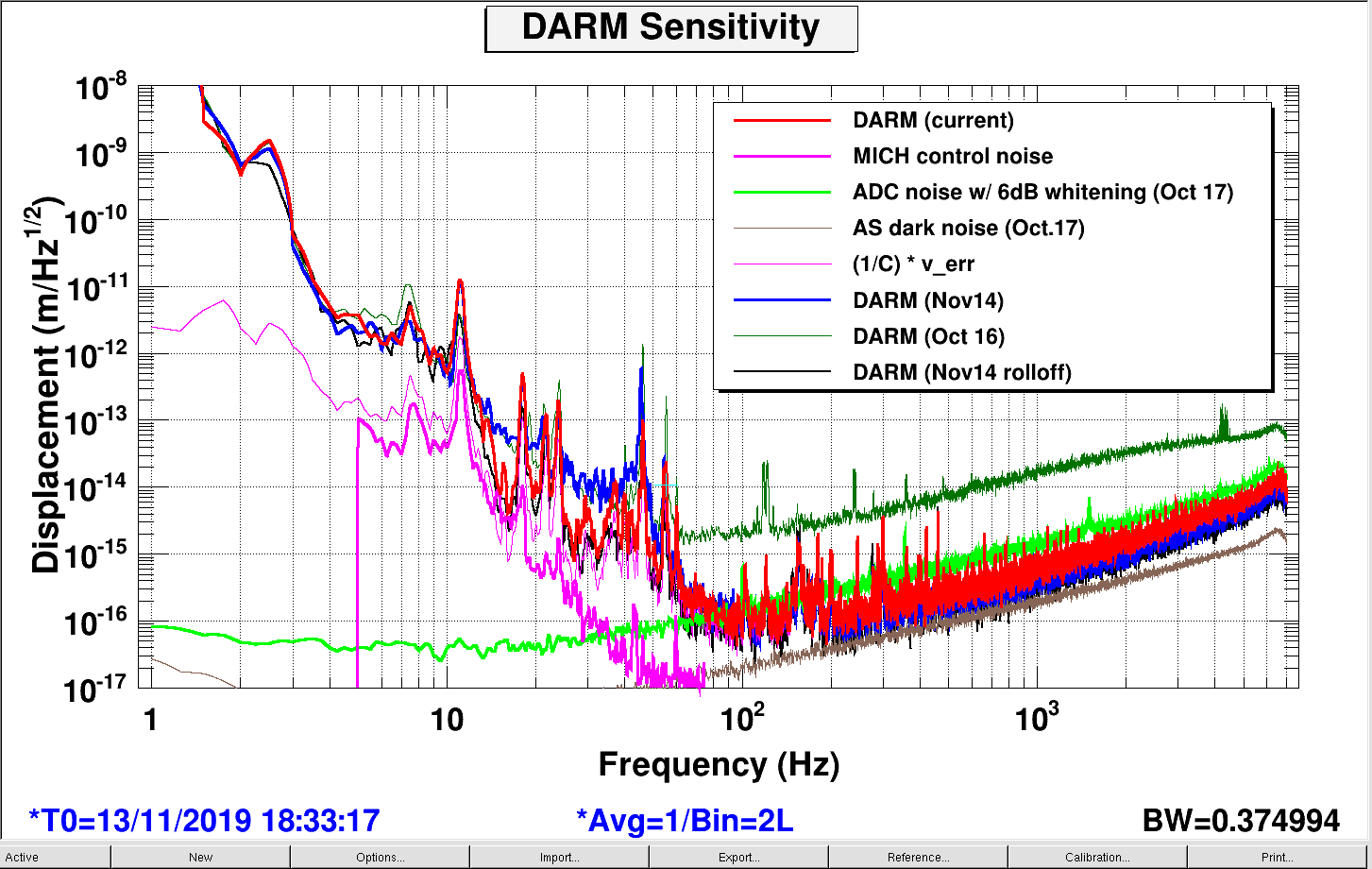
Here is the sensitivity curve. The sensitivity at the high frequencies improved drastically. We also engaged the whitening filter for the AS signal, and it improved the sensitivity down to the AS PD dark noise. There seems to be another electrical noise.
3. Low-frequency improvement.
I implemented the roll-off filter into the ETMX MN PIT oplev loop. It improved the noise floor below 100 Hz.
-----------------
- Notes
- ITMX yaw motion is terrible.
- We really need to reduce the peak
- The next noise to be hunt might be a MICH control noise. It limits below 30 Hz.
- Of course, we need to damp the 40-ish Hz peak.

{kind=link}
{kind=link}