Yesterday I worked a bit on the optimization of the ID for ETMX
In the First version of ID implemented at ETMX, using geophones, I set the blending frequency for L and T at 180 mHz: in this configuration the loops were stable, but seismic noise was not suppressed.
So I tried to implement a new version of ID moving the blending frequency from 180 mHz (in L and T) to 150 mHz.
Before I worked a bit on the optimization of the geophone signal:
1) I checked the calobration factor
2) I checked the sensing matrix of the geophones (following the procedure describe in the see klog 8327)
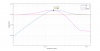
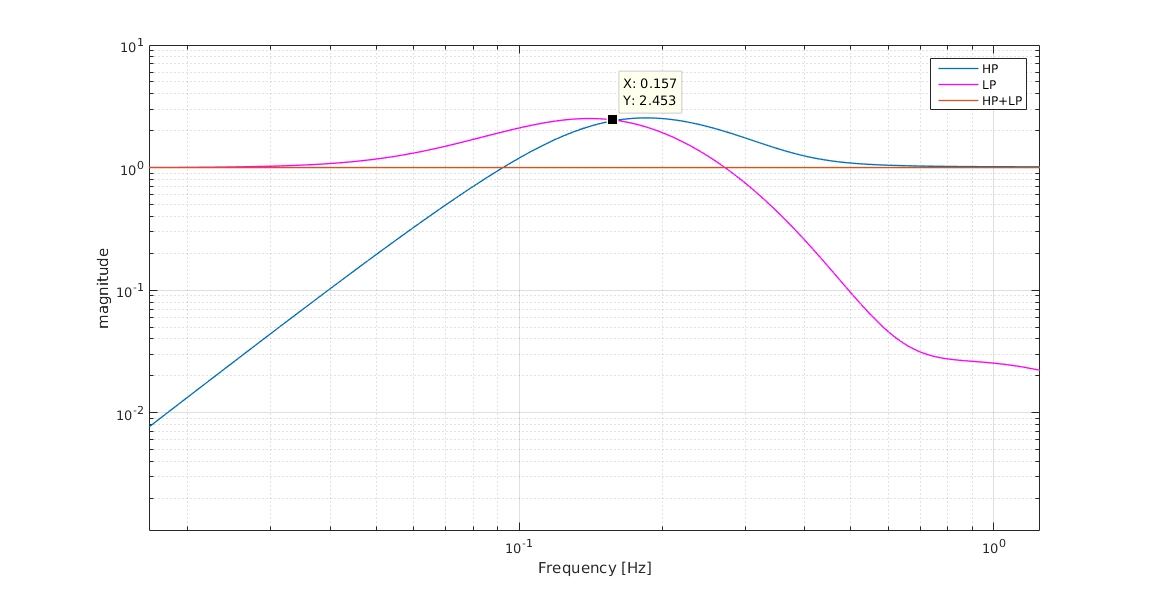
4) I implemented the the new blending frequency (LP155, HP150 Pic1).
5) I turned on the ID only along L and T with UGF (first cross) at 0.12 mHz.
6) Y is controlled with LVDT.
The loops are stable.
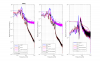
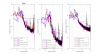
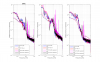
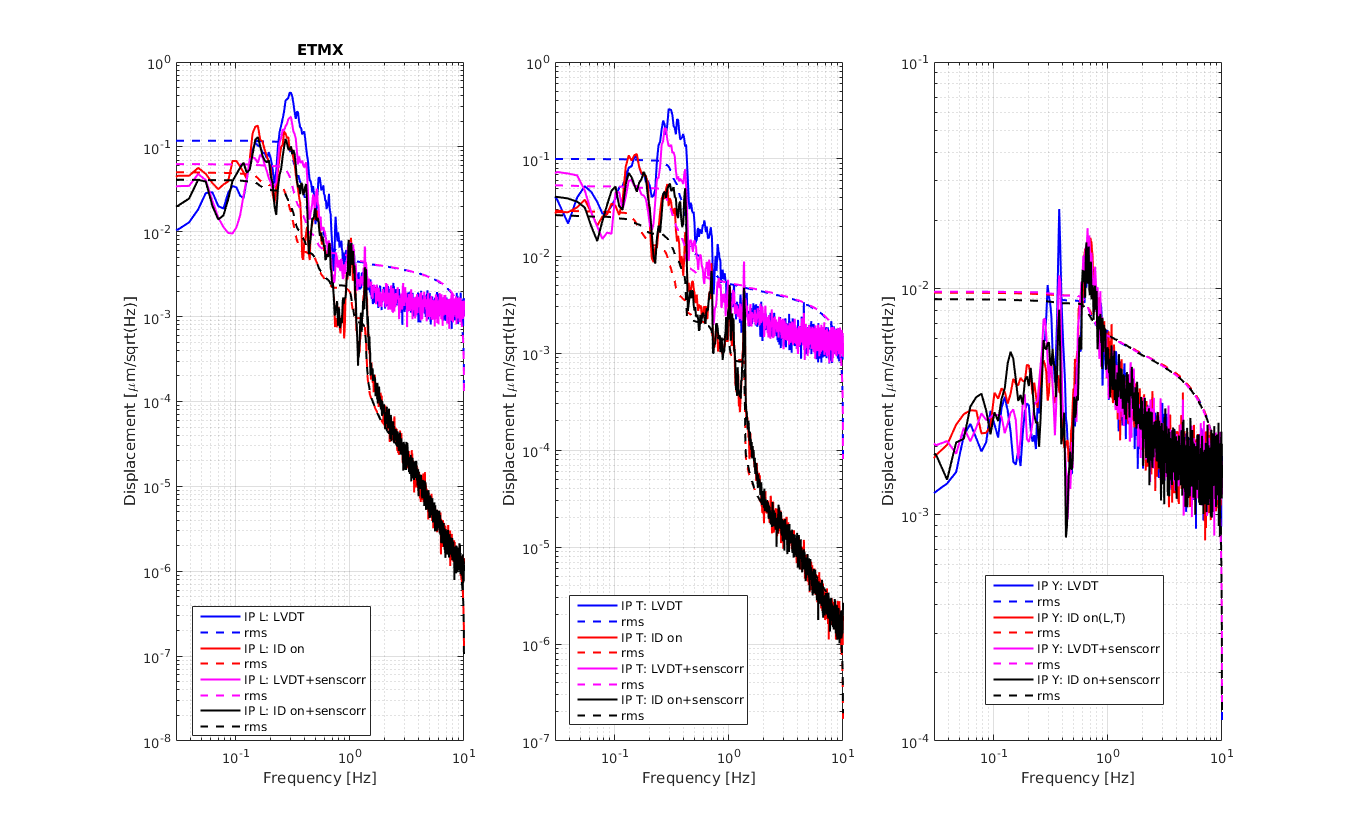
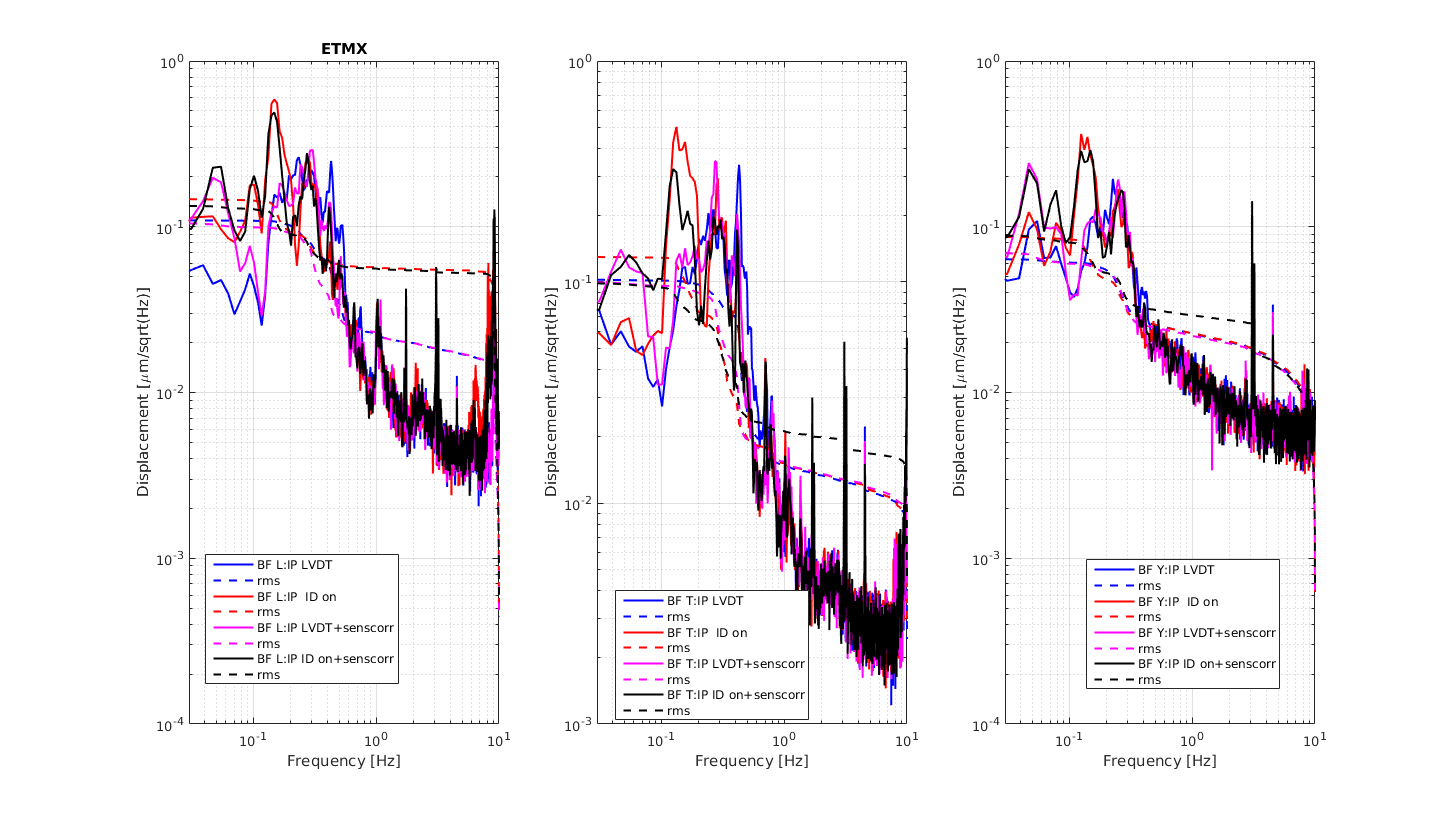
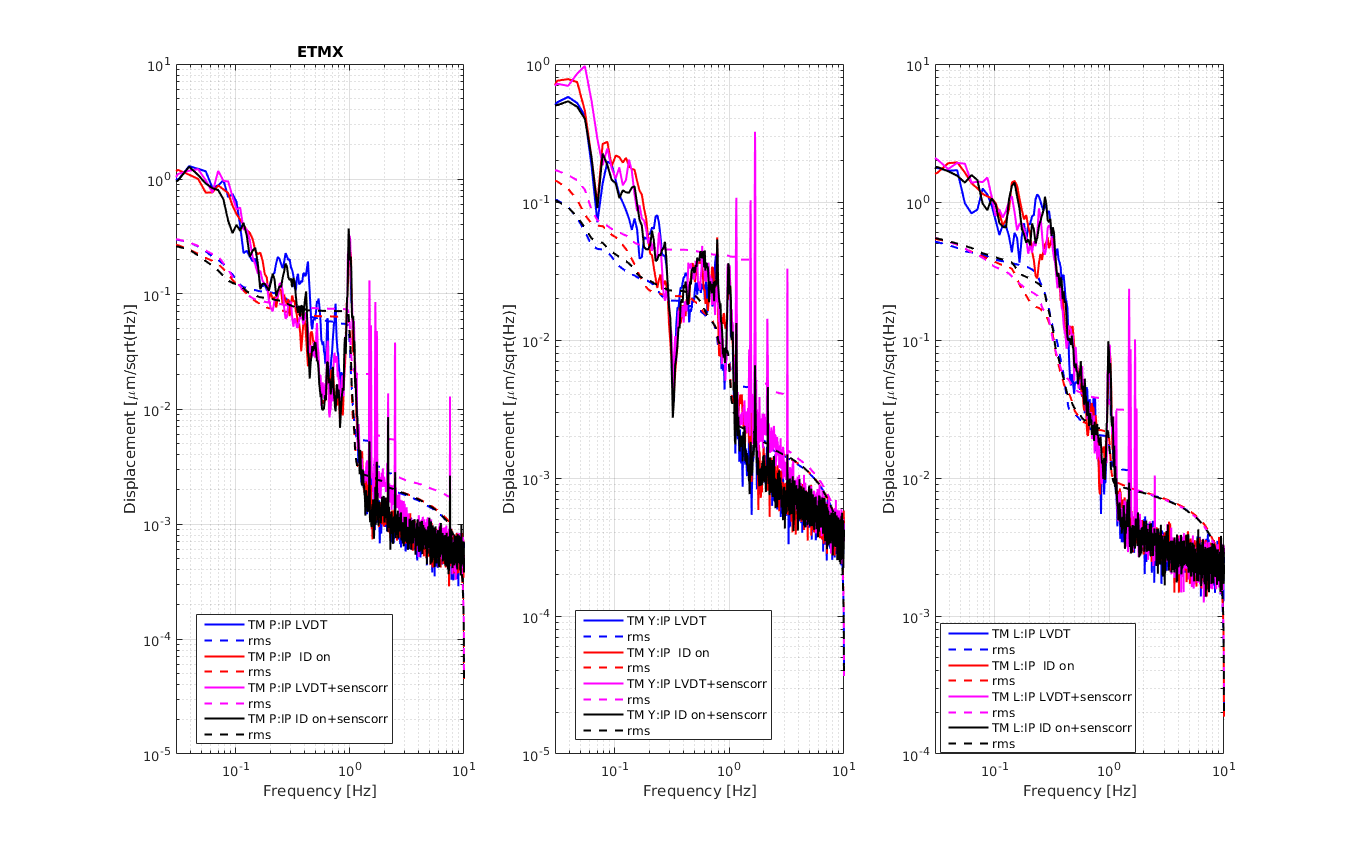
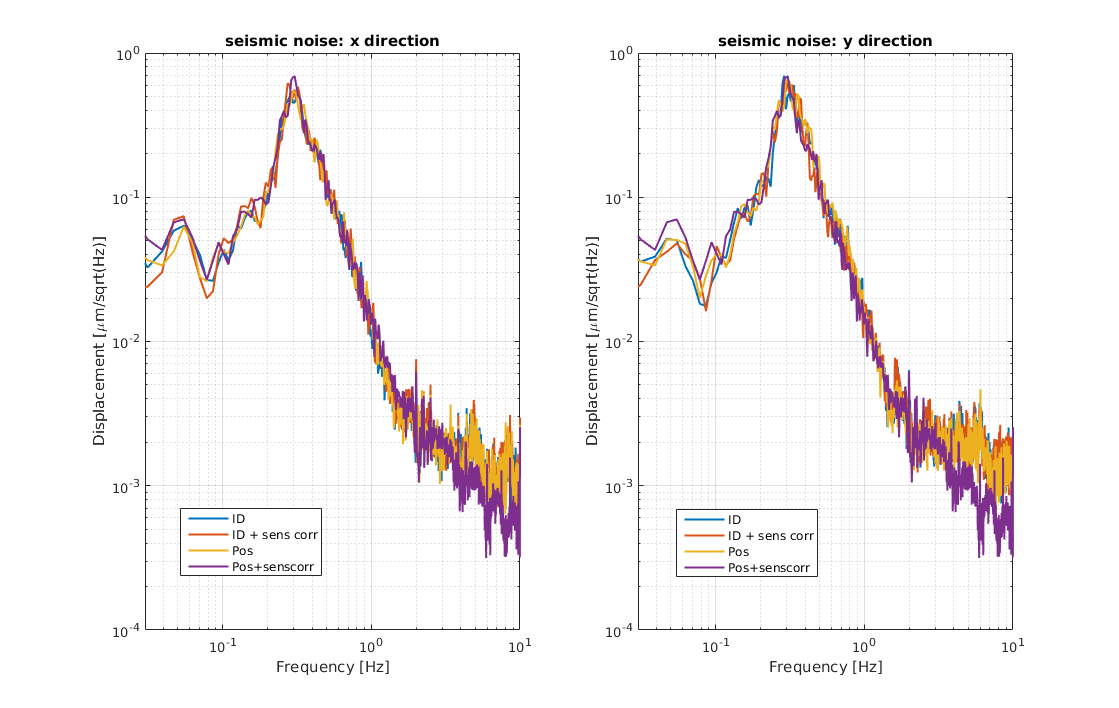
In Pic 2, Pic2 and Pic4 the SPectra of IP , BF (L,T,Y) and TM (P,Y,L) and the relative rms, when the following configuration on the IP are implemented, are shown:
-Blu: IP in position control
-Magenta: IP Position control+ IP sensor correction
- Red : IP ID on
-Black: ID+ sensor correction on
We can see that:
1) IP RMS in the configuration ID+ sensor correction is 0.03 micron in L and T
2) In both cases (ID and ID + sens correction on) the BF RMS is 0.1 micron in L and T and 0.09 microradiands, but the peack at 0.08 Hz and 0.150 Hz is growing up (investigation on going).
3) From 0.1 to 0.3 TM P, Y motion is reduced because of the ID.
Note:
1)In both configuaration BF_L , BF_T damping loops were also turned on.
2) This version of ID is running from yestarday afternoon.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}